Tray, slide loading; PCON
For technicians and partly for sales managers!
This description handles the functionality, instructions and
adjustments to install and to check the tray loader and slide loader unit for
Pannoramic Confocal scanners.
Software relevant
explanations are based on the software version 1.19.
· The unit is derived from the scanner
“modular
· Only
some mechanical modifications are realized, the working principle is not
modified.
Setup and
adjustment procedures
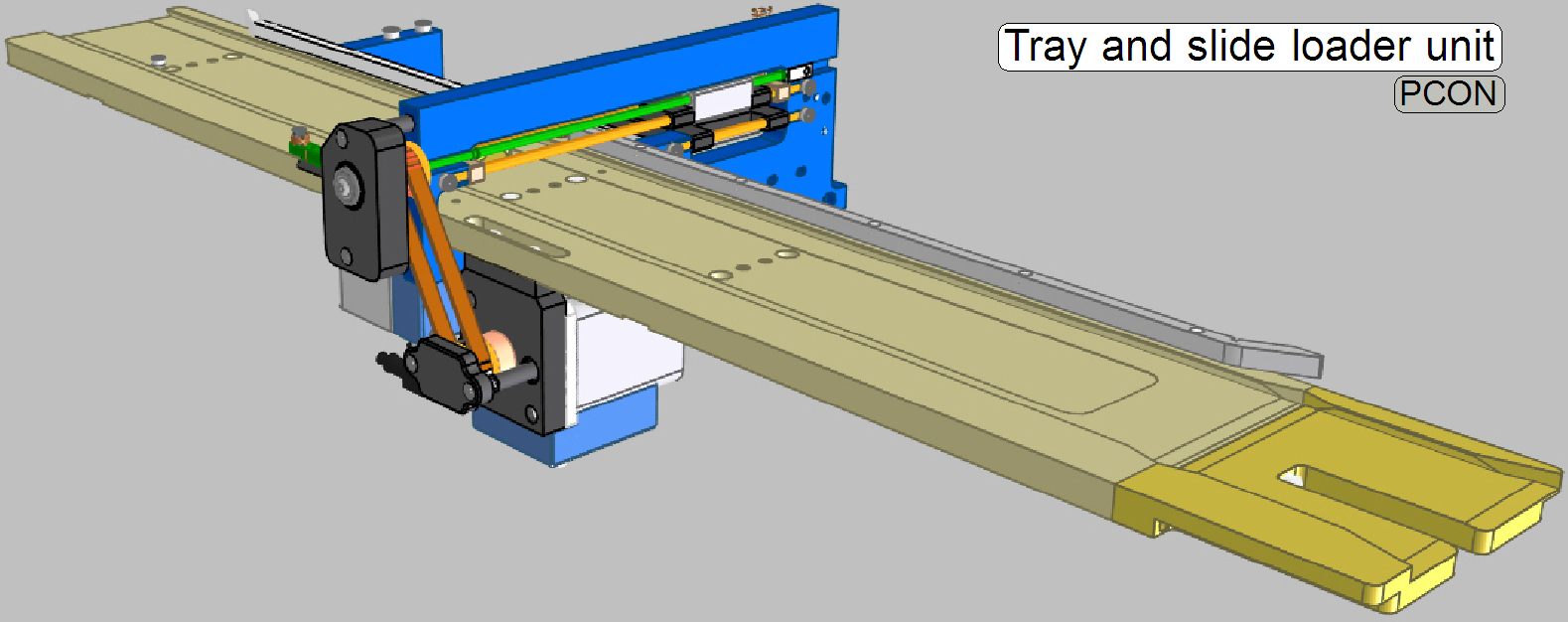
The tray loader unit is used to hold and transport the
tray in the tray holder. The tray itself contains 12 slide bays and is always
inserted or removed from the right side of the scanner. Because the slide is
not fixed in the slide bay, the slide guide rail ensures that the slide has the
proper position in the slide bay during tray insertion and movements. The
movement of the tray is realized with a stepper motor.
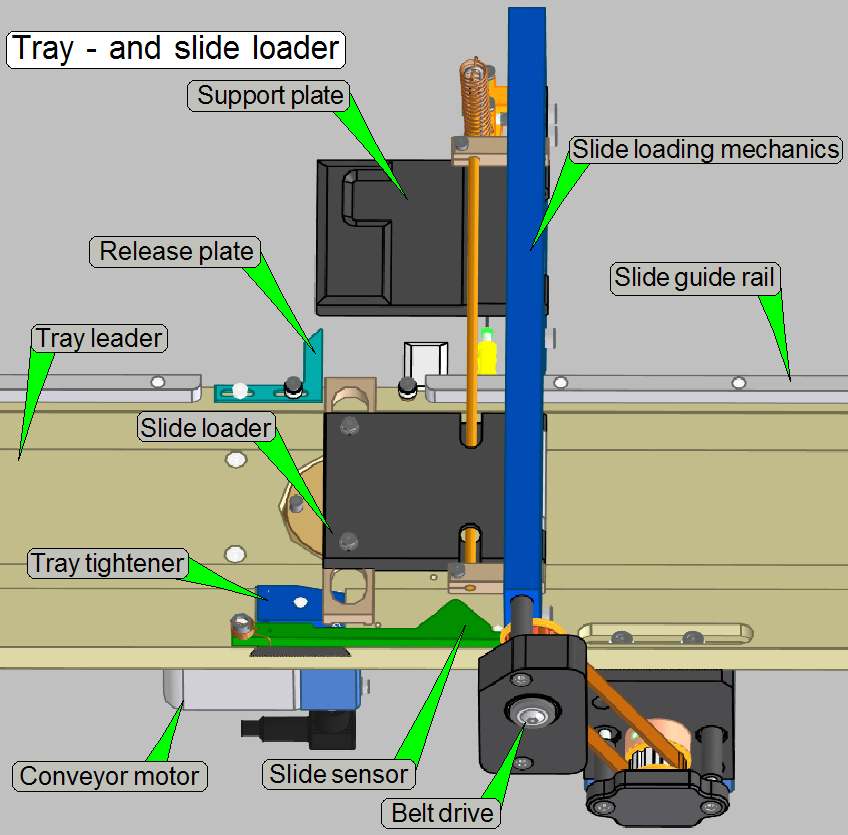
The slide sensor checks the slide bay before the bay
of the slide to be inserted. If there is no slide present, then this position
will be excluded from the slide loading process.
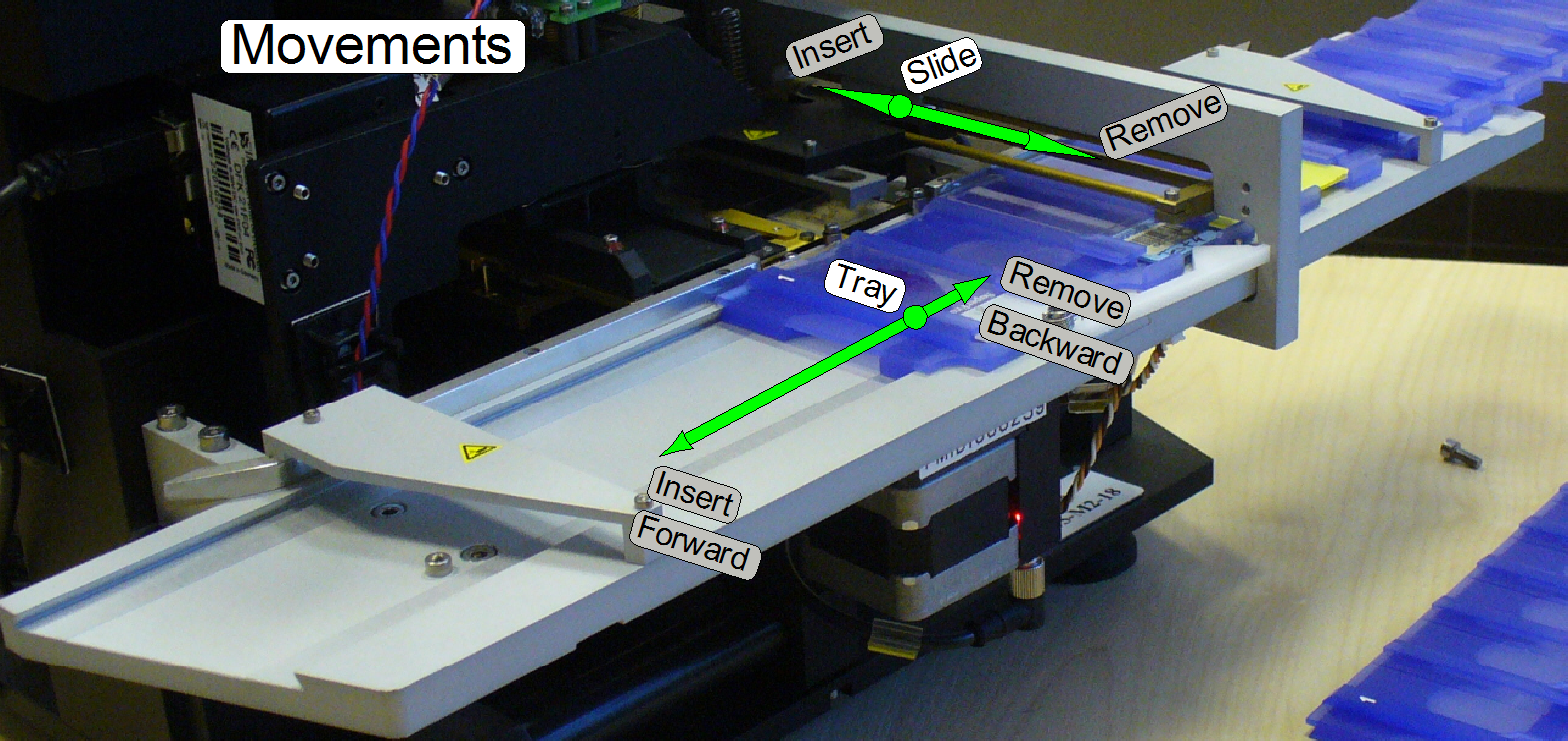
The slide loader moves the slide from the bay position of the tray
into the specimen holder during slide insert action or in opposite direction,
from the specimen holder to the bay position of the tray during a slide remove
action by using a stepper motor driven mechanics. To ensure, that the slide
does not falling down during a slide insert or remove action, the support plate
supports the slide from beneath.
 Exchange
of the tray- and slide loader unit is necessary:
Exchange
of the tray- and slide loader unit is necessary:
- If one of the stepper motors or its
electronics is faulty.
- If the
shape of any part is deformed or a part is broken.
- If the tray
loader or slide loader unit has any fault and you are unable to fix it.
Please refer first to the chapter “Before you start to replace units”!
Requirements
- Service program for slide
scanners (SlideScannerService.exe) with actual license file
- Slide
scanner and Slide scanner Viewer software (SlideScanner.exe,
SlideViewer.exe) with dongle or actual license files
- 0.9, 1.5,
2.5, 3 and
- Hardware
and construction
knowledge of Panoramic Confocal
Play video: “Tray and slide loading”; “Remove tray”

Attention: Do not mix the versions of SlideScanner.exe and SlideScannerService.exe! Always use these programs with the same version number. Otherwise the SlideScannerService.exe program could produce unwanted results and SlideScanner.exe does not work correctly or even freeze!
Since the software version 1.15 the units of the
scanner are configured in the file “MicroscopeConfiguration.ini”, section
[Microscope].
The actual
version of the tray loader unit in the scanner Pannoramic Confocal is “LoaderType=SL_1Mag_12Slide_Sensor_Horizontal2”.
· The path of the file
MicroscopeConfiguration.ini, in the software version with the operating system
Windows® 7 is:
C:\ProgramData\3DHISTECH\SlideScanner\MicroscopeConfiguration.ini
 [Microscope]
[Microscope]
SerialNumber=PCON_xxx
MicroscopeType=3DMic10
MicroscopeSubtype=Confocal
ScanCameraType=
PreviewCameraType=CVrmc_m8_pPro
BarcodeReaderType=PreviewCamera
LoaderType=SL_1Mag_12Slide_Sensor_Horizontal2
CameraChangerType=CC_none
ReflectorTurretType=RT_None
BrightfieldLightSourceType=RGBLedLight
ObjectiveChangerType=OC_2Pos
ObjectGuideXYZType=OGXYZ_FLASH4
FlashUnitType=NoFlashUnit
NDFilterType=NDType_None
PreviewLightType=PreviewLightUnitType_Type2
ShutterMotorType=Shutter_Motor
PowerSwitchBoardType=PowerSwitchBoard_Type1
ConfocalUnitType=ConfocalUnitType_Aurox
WaterFeederType=WaterFeeder_Type1
LoaderType=SL_1Mag_12Slide_Sensor_Horizontal; the sensors are connected to the
DC-controller, like in the PMIDI
LoaderType=SL_1Mag_12Slide_Sensor_Horizontal2; the sensors are connected to the USB
controller, like in the PCON
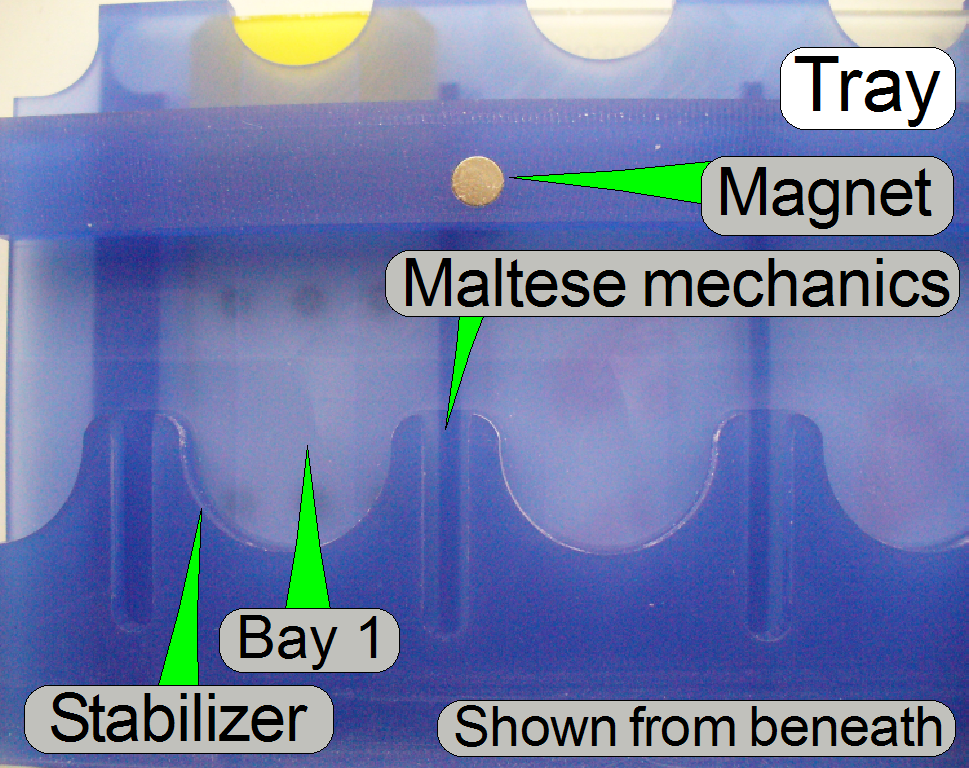
 The tray has 12 slide bays, so it can contain
up to 12 slides and is inserted with the position 1 from the right side of the
tray leader. The slides are not fixed in the slide bay, so they might fall
down, if the tray is not handled horizontally.
The tray has 12 slide bays, so it can contain
up to 12 slides and is inserted with the position 1 from the right side of the
tray leader. The slides are not fixed in the slide bay, so they might fall
down, if the tray is not handled horizontally.
From beneath, the
tray has a dovetail to leading it in the tray leader; and the correspondent
part to the Maltese conveyor pin of the conveyor dial, to allow a tray movement
from slide bay to slide bay. If the 12th position is reached, the
tray must be moved backward to the insert and eject position, to allow the
remove or exchange of the tray.
The permanent
magnet is used to activate the tray sensor if a tray is present in the tray
leader. This magnet defines together with its sensor, the tray’s insert and
eject position, in this position the tray can be inserted and exchanged.
The slide bays
and conveyor mechanics of the tray should be kept clean and dry. The tray does
not need adjustment.
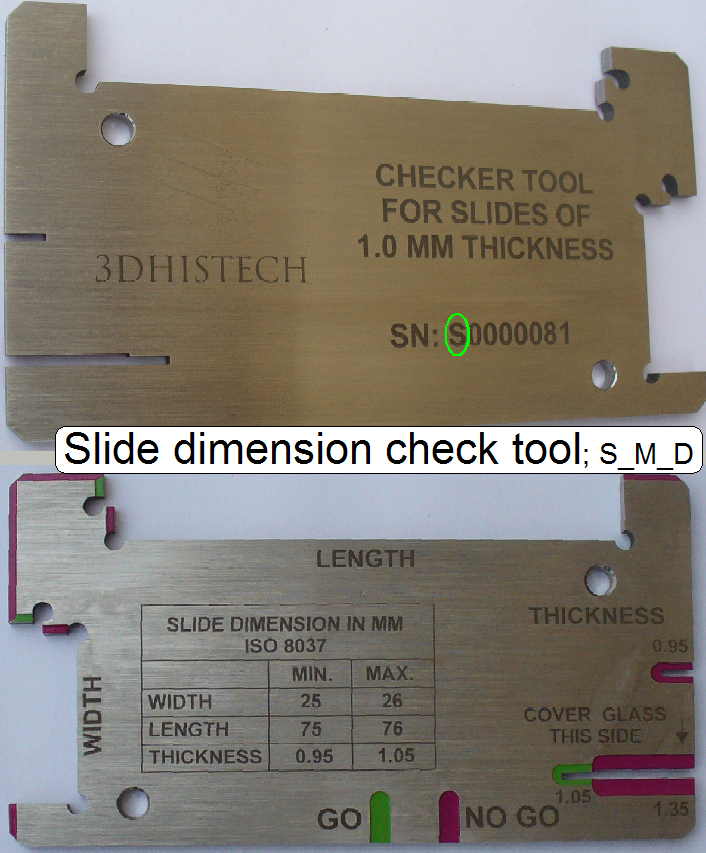
Length: 75.00 to
Width: 25.00 to
Thickness: 00.95 to
Since January
- If the
first character of the serial number is an “S” the tool
is used to check the slide dimensions of the scanners “PCON”, “SCAN”,
“MIDI” and “DESK””.
- If the
first character of the serial number is a “P” the tool
is used to check the slide dimensions of the scanner “P250”.
·
Please check the slide dimensions
before filling the tray!
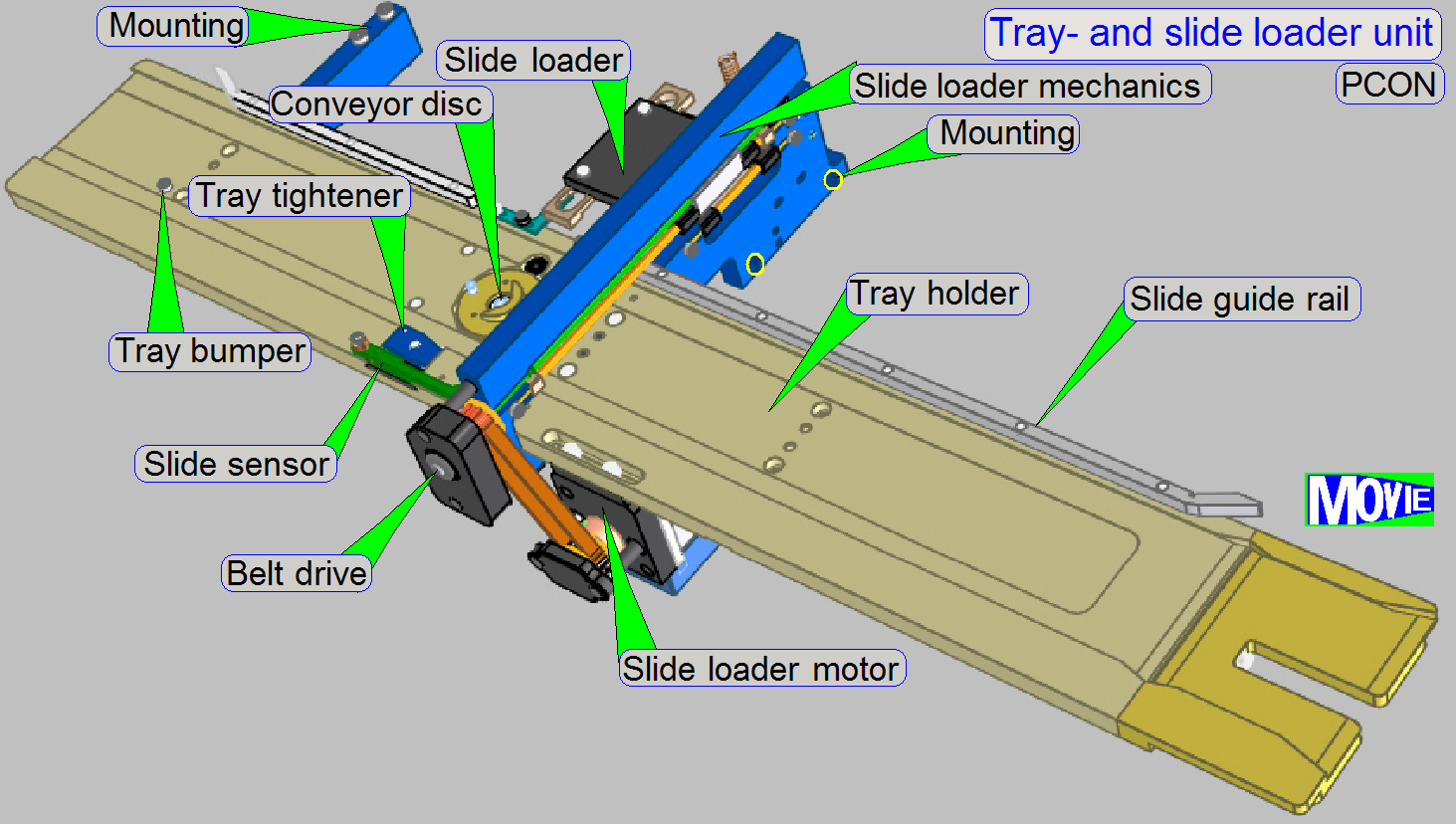
 The tray is always inserted or removed
from the right side of the scanner; on the left side of the slide leader a
bumper is situated to ensure, that the tray can not be inserted or removed from
or removed to the left side. The reason for this is technical nature, the
implementation and construction of the tray loader mechanics. On the longer
edges of the tray leader dovetail rails are realized. This solution guarantees
the proper position of the tray and the slide bays. The tray tightener ensures
a slippage free convey and holding of the tray.
The tray is always inserted or removed
from the right side of the scanner; on the left side of the slide leader a
bumper is situated to ensure, that the tray can not be inserted or removed from
or removed to the left side. The reason for this is technical nature, the
implementation and construction of the tray loader mechanics. On the longer
edges of the tray leader dovetail rails are realized. This solution guarantees
the proper position of the tray and the slide bays. The tray tightener ensures
a slippage free convey and holding of the tray.
·
The
tray leader and the tray tightener should be kept clean and dry; they do not
need adjustment.
·
Check
the tray tightener for easy movement! Paraffin residues and small glass shards
may prevent it from correct working and tray stumble may be the result!
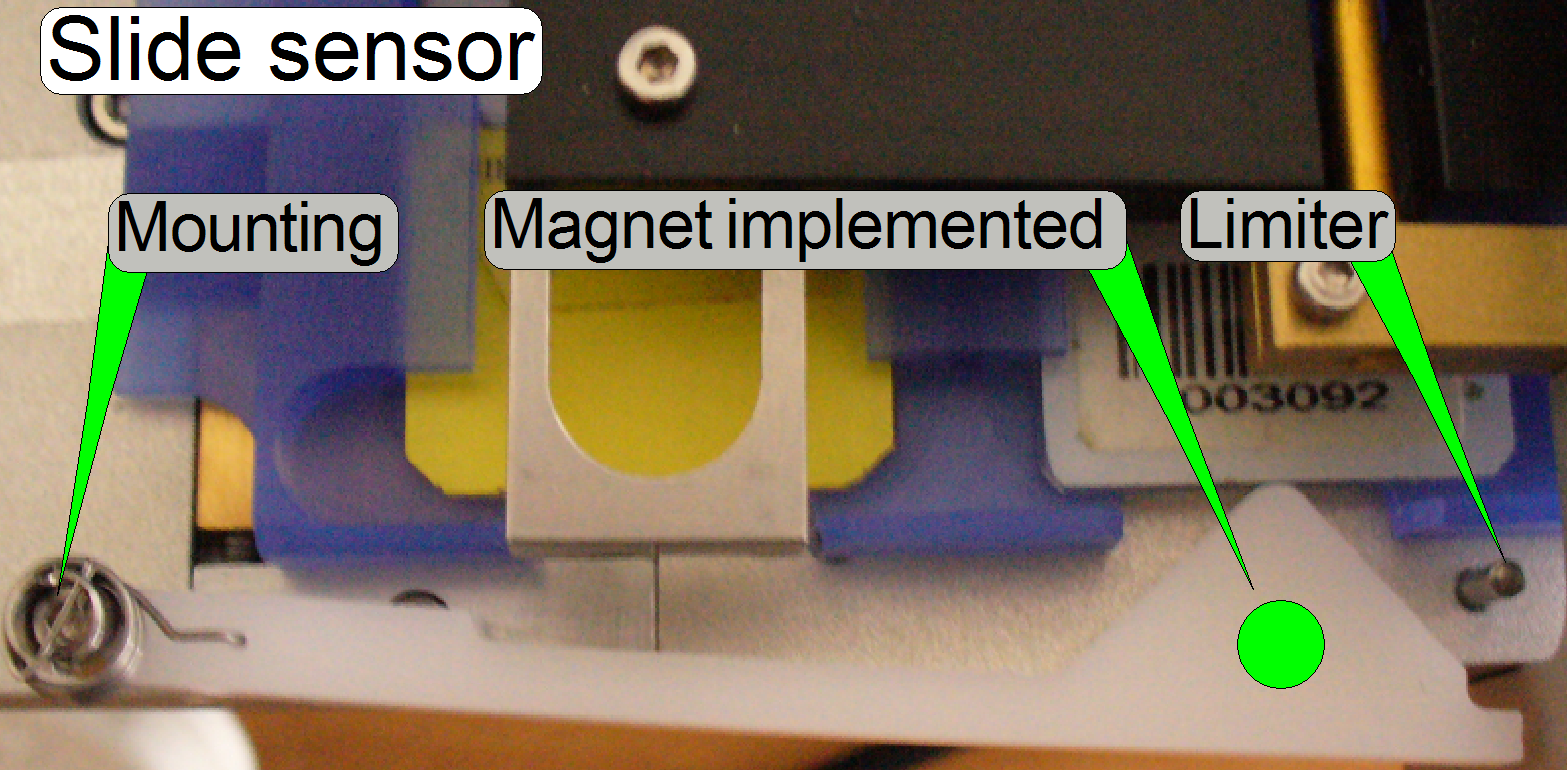
 Because the slides are not fixed in the
slide bay of the tray, the slide guide rail pushes the slides into the slide
bay during tray movement. Together with the slide sensor arm the proper
position of the slide in the slide bay is defined.
Because the slides are not fixed in the
slide bay of the tray, the slide guide rail pushes the slides into the slide
bay during tray movement. Together with the slide sensor arm the proper
position of the slide in the slide bay is defined.
·
The
slide sensor arm pushes the slide against the slide guide rail during sensing
the presence of the slide and defines so the Y-position for slide insertion
also.
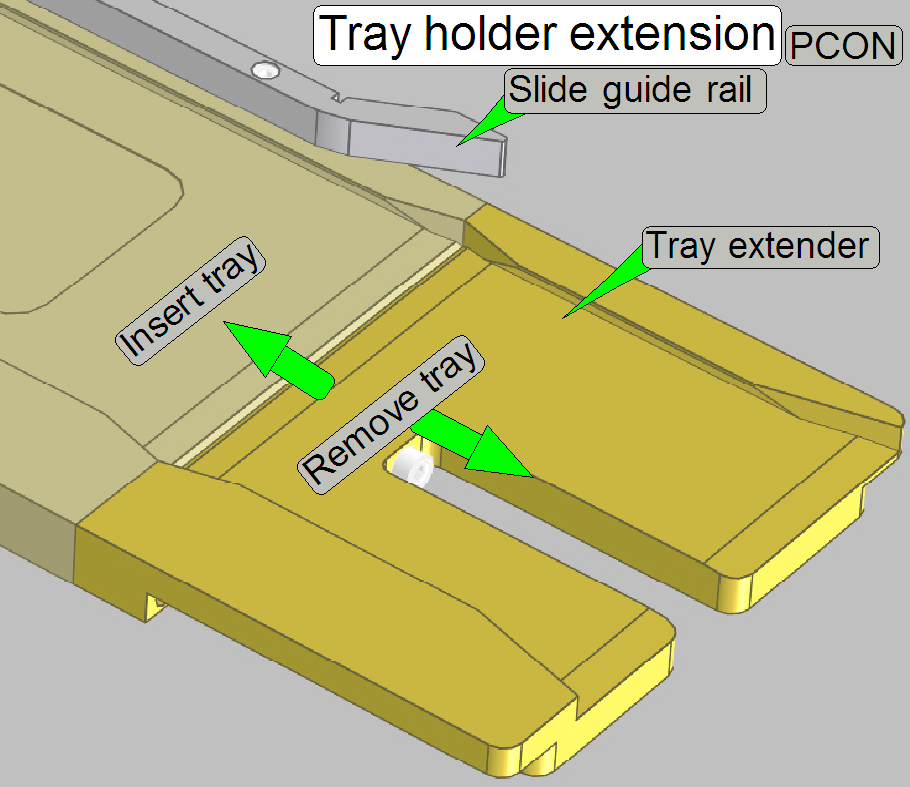
Tray holder extension
The tray holder
is prolonged by the extender, so the tray may be correctly inserted if the tray
loader door of the housing is opened.
·
The
Slide guide rail and the Tray
dovetail leading should be kept
clean and dry; they do not need adjustment.
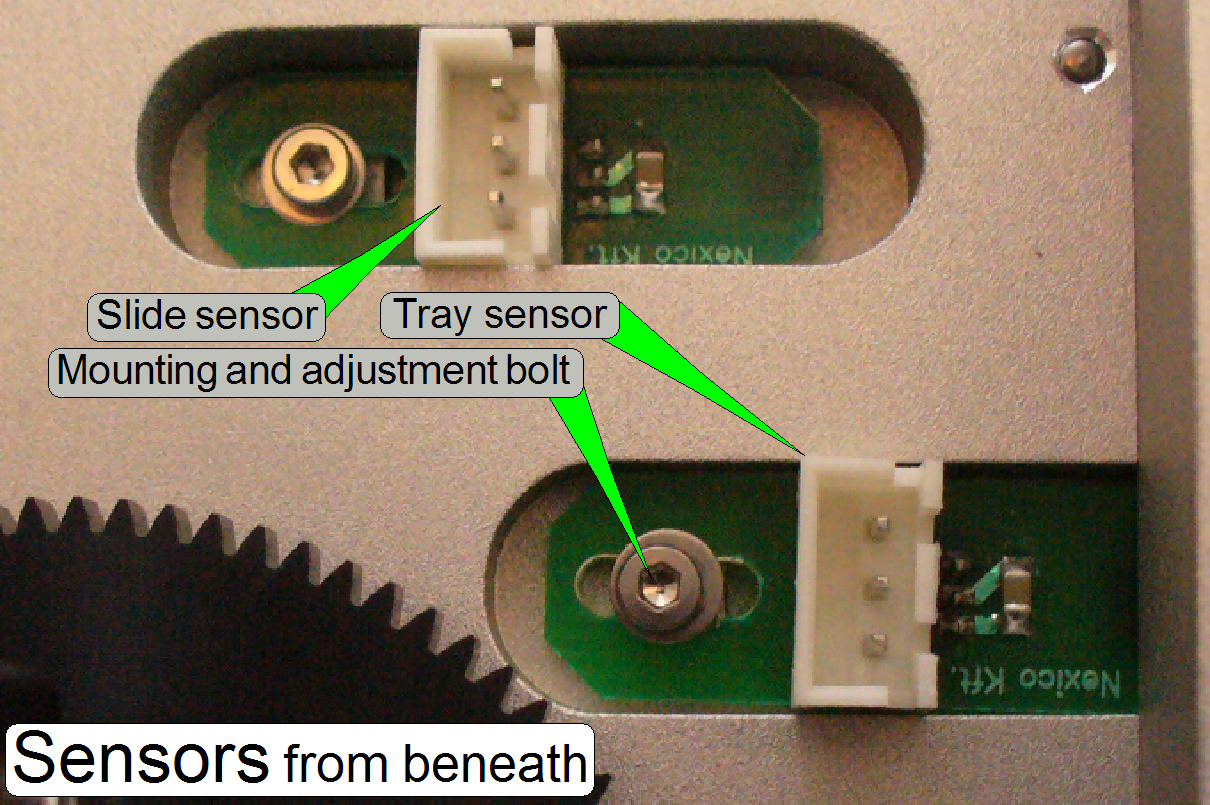 The tray sensor recognizes the presence of
a tray in its insert or remove position. This sensor is attached by the
presence of the magnet in the tray. The sensor is connected to the electronics
with the cable CF01E.
The tray sensor recognizes the presence of
a tray in its insert or remove position. This sensor is attached by the
presence of the magnet in the tray. The sensor is connected to the electronics
with the cable CF01E.
The sensor does
not need maintenance, but its position is adjusted. See also “Setup
and adjustment procedures”.
Cable label; Tray sensor: CF01E
Slide sensor: CF01F
See also: “Sensors and
sensor states“ and “Hall
sensors”
 The slide sensor fulfills two tasks; it
senses the presence of the slide mechanically, one position before the slide
insert position and so it helps to bring the slide into the correct X- and
Y-position for the slide insert procedure also.
The slide sensor fulfills two tasks; it
senses the presence of the slide mechanically, one position before the slide
insert position and so it helps to bring the slide into the correct X- and
Y-position for the slide insert procedure also.
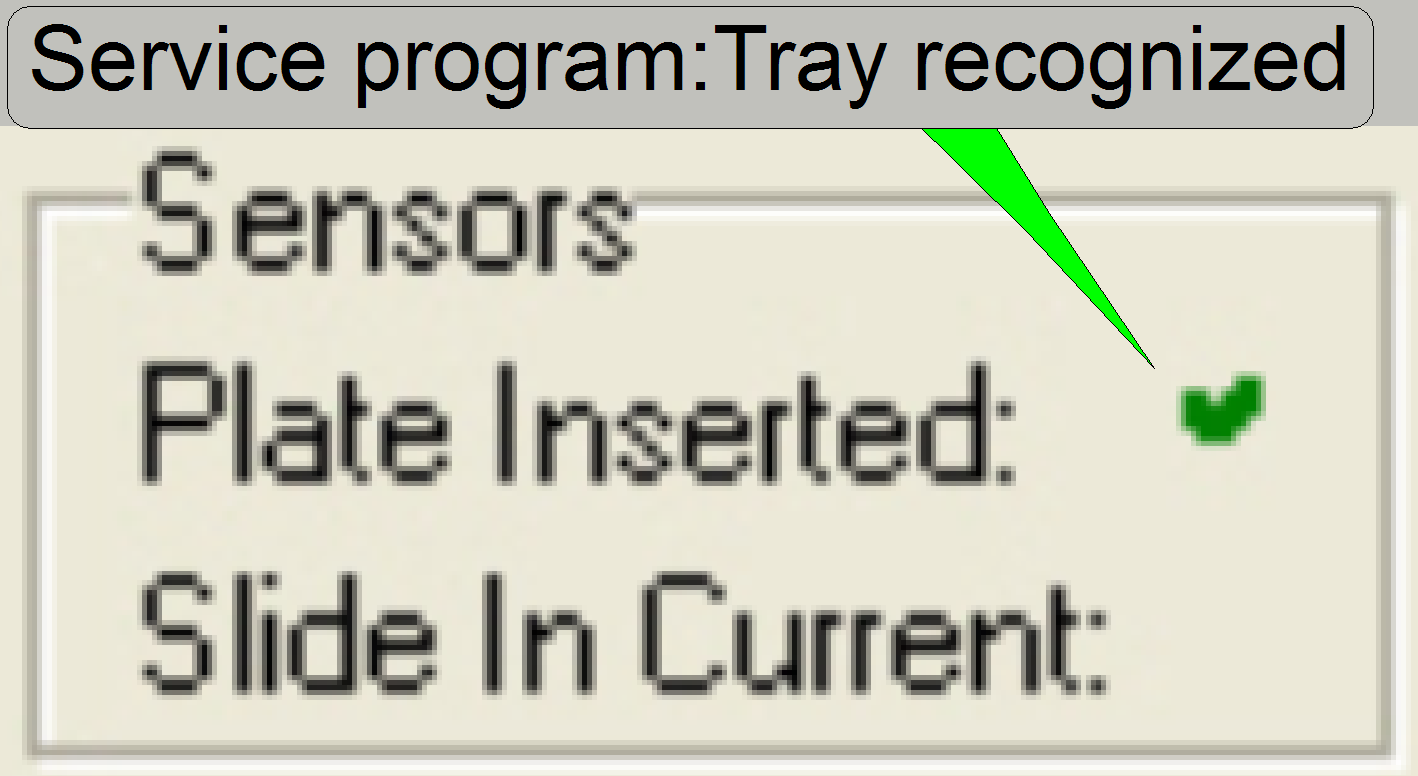
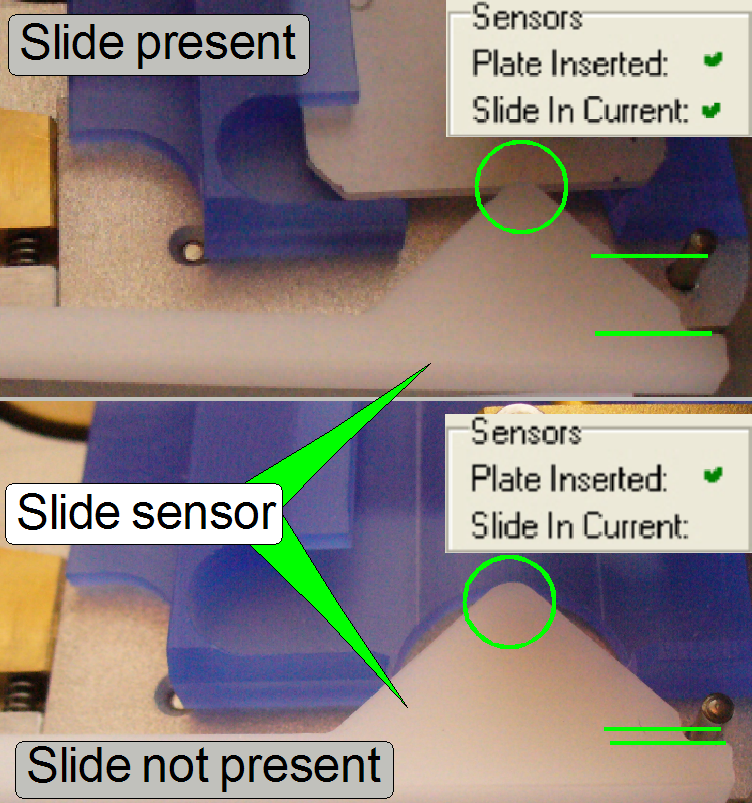
1. The slide sensor senses the presence of a
slide in the slide bay of the tray. The slide is sensed in the position before
the slide’s insert position, so the software knows that the next slide bay
contains a slide or not. The slide is assumed as present if the magnet does not attach the sensor, in other words, the magnet is moved away from the
sensor if a slide is present. If the sensor is attached by the magnet, no slide
is present, the slide bay is empty. The sensor is connected to the electronics
with the cable CF01F.
The sensor does not need maintenance, but its position is adjusted. See
also “Setup and adjustment procedures”.
See also: “Sensors and
sensor states“ and “Hall
sensors”
2. 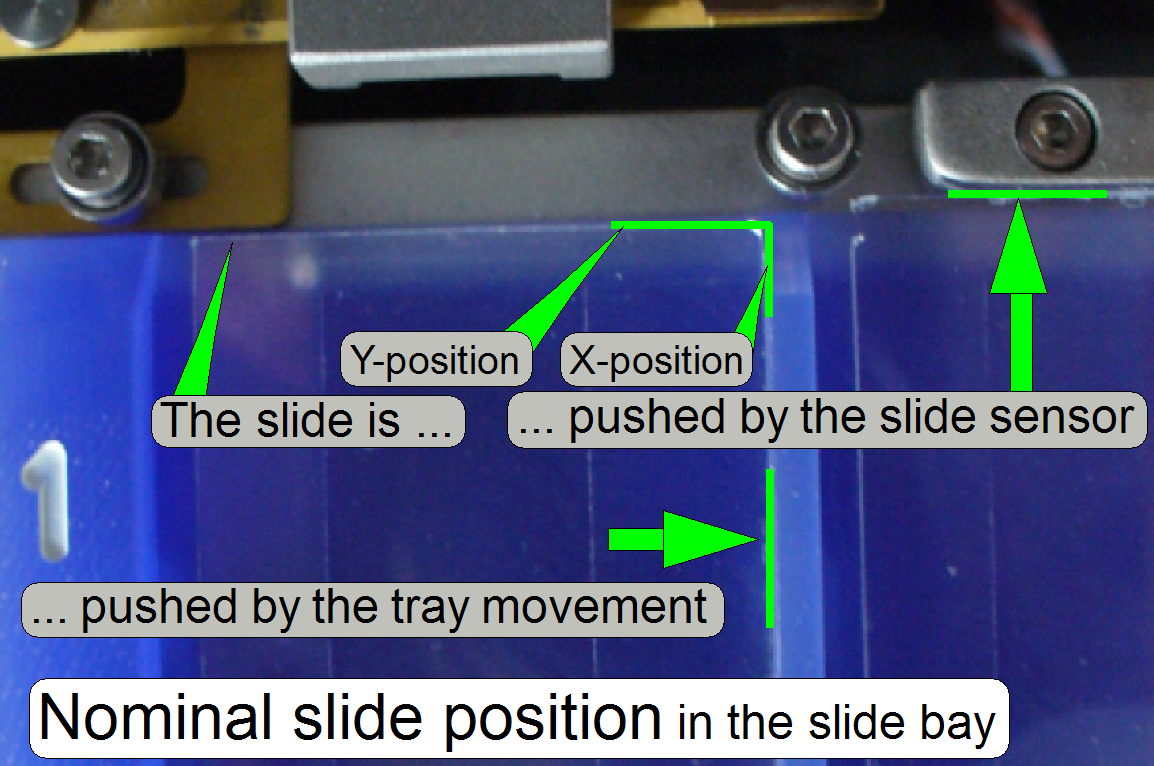 The slide sensor pushes the slide against
the slide guide rail, so the position of the inner edge of the slide (the
Y-position) for the slide loading operation is found. Because the movement of
the tray is not finished if the slide is released by the slide sensor, this is
only the nominal position, the real position might differ some tenth
millimeter.
The slide sensor pushes the slide against
the slide guide rail, so the position of the inner edge of the slide (the
Y-position) for the slide loading operation is found. Because the movement of
the tray is not finished if the slide is released by the slide sensor, this is
only the nominal position, the real position might differ some tenth
millimeter.
3. The slide sensor together with the slide
guide rail holds the slide on the shorter edges in its position; and if the
tray moves the sensed slide bay to the slide insert position (the tray moves
from the right to the left), the slide will stay in its position until the
right-hand edge of the slide bay touches the slide and moves it to the slide
insert position (so the X-position of the slide is found). Because the movement
of the tray is not finished if the slide is released by the slide sensor, this
is only the nominal position, the real position might differ some tenth
millimeter.
If the tray is moved backward and any previous slide should be loaded,
the tray moves 1 slide bay position more backward as required and then a
forward movement follows; so the nominal X- and Y-position of the slide will be
found and the slide will be sensed also before slide insertion.
Principle
of support plate and slide loader spreading
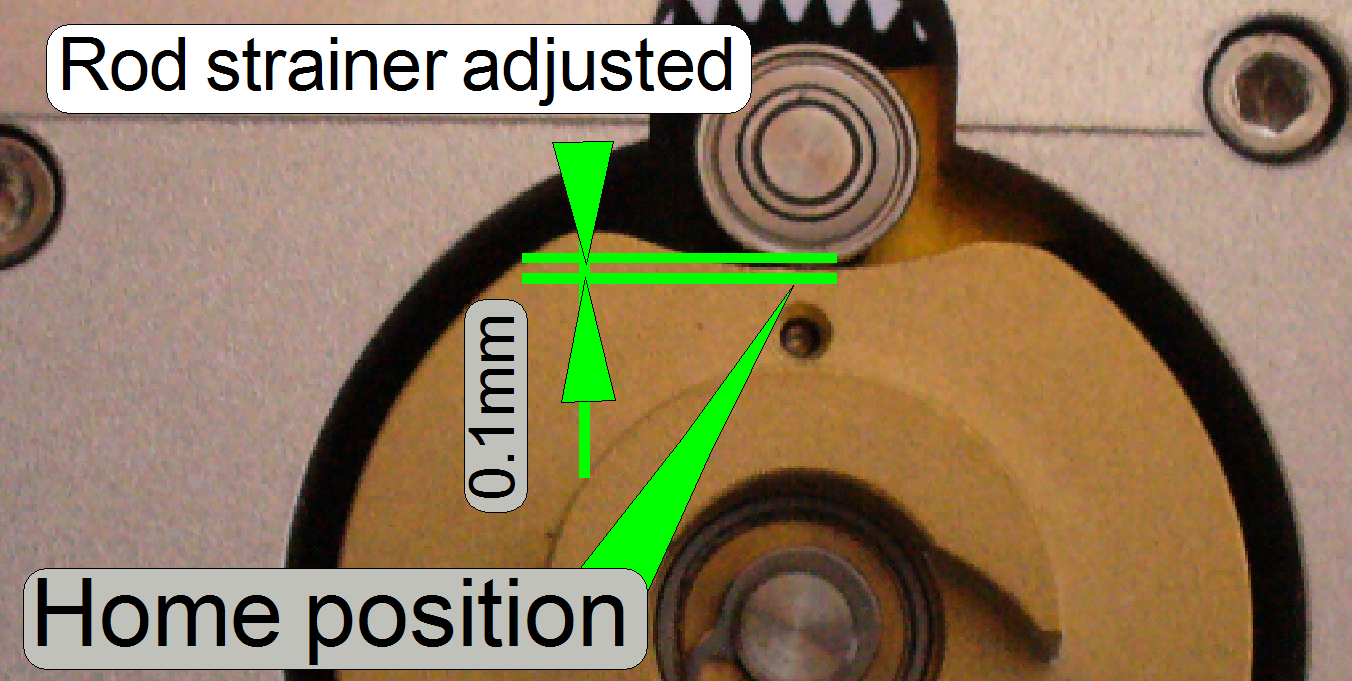
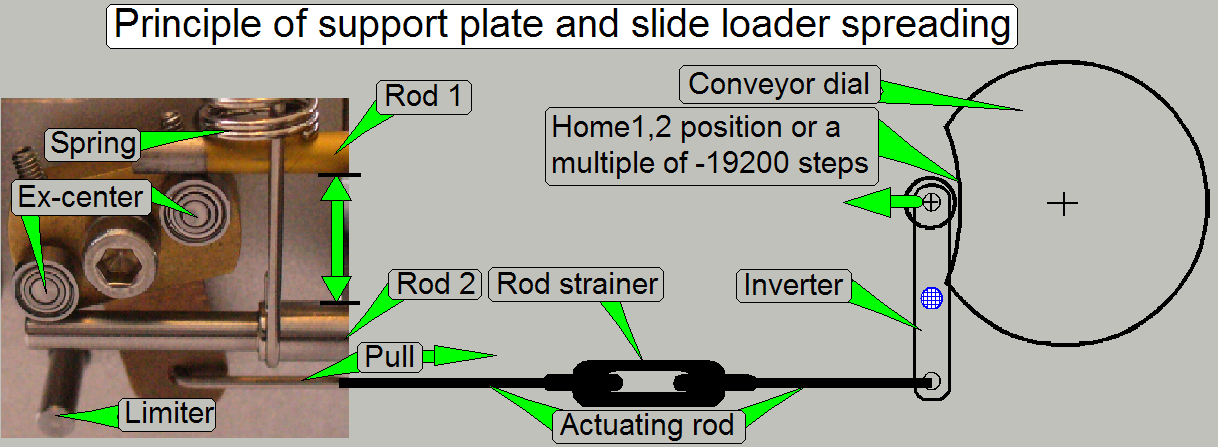 If the conveyor dial is in the Home1,2 position
(or a multiple number of -19 200 steps), the actuating rod does not pull the
ex-center, the “Rod
If the conveyor dial is in the Home1,2 position
(or a multiple number of -19 200 steps), the actuating rod does not pull the
ex-center, the “Rod
·
The
real slide movement is done, if the conveyor dial stays in Home1,2 or a
multiple number of 19 200steps.
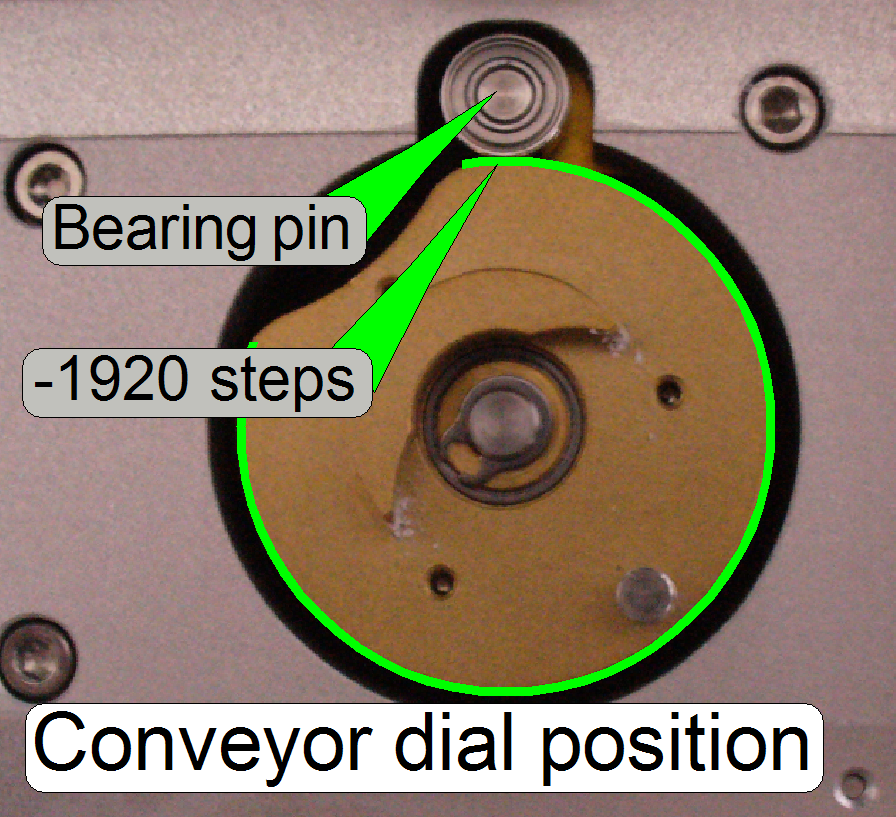 If the conveyor dial is in the position of
-1920 motor steps (the tenth number of motor steps of a conveyor dial
revolution) or anywhere else on this part of the perimeter, the actuating rod
is pulling the ex-center and this is spreading the “Rod
If the conveyor dial is in the position of
-1920 motor steps (the tenth number of motor steps of a conveyor dial
revolution) or anywhere else on this part of the perimeter, the actuating rod
is pulling the ex-center and this is spreading the “Rod
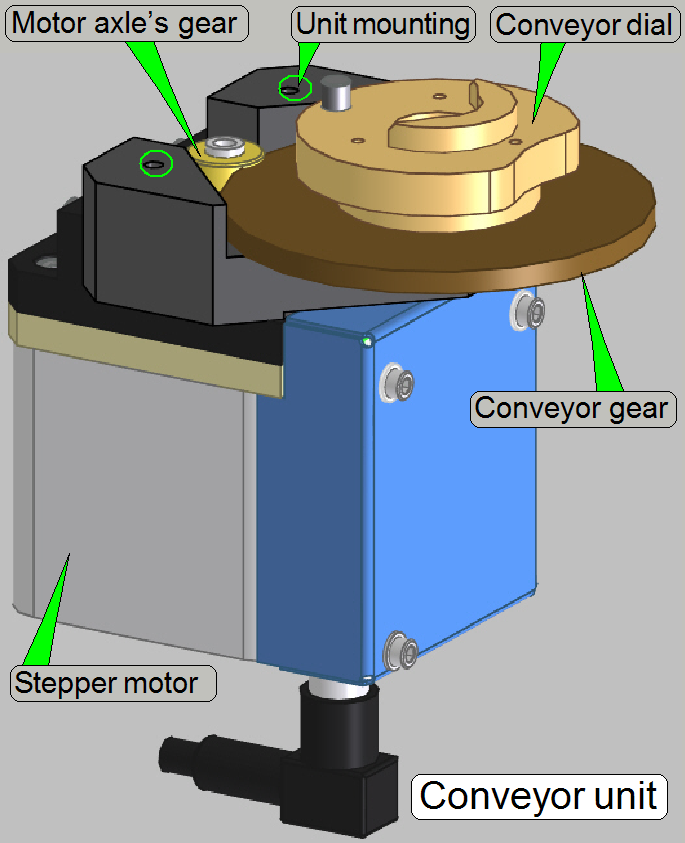 The drive of the conveyor unit and the
slide loader unit is realized with stepper motors, and these are driven in micro
stepping mode. One revolution of rotor axle is divided into 3200 steps. The
forward direction of the motor’s axle is counter clockwise, CCW.
The drive of the conveyor unit and the
slide loader unit is realized with stepper motors, and these are driven in micro
stepping mode. One revolution of rotor axle is divided into 3200 steps. The
forward direction of the motor’s axle is counter clockwise, CCW.
· The address of the Slide loader motor is 08.
· The address of the Tray conveyor motor is 07.
· The parts and units of the stepper motors need neither maintenance nor mechanical adjustments.
See also: “Stepper motor”, “Addresses” and “Cabling of addressable
units”
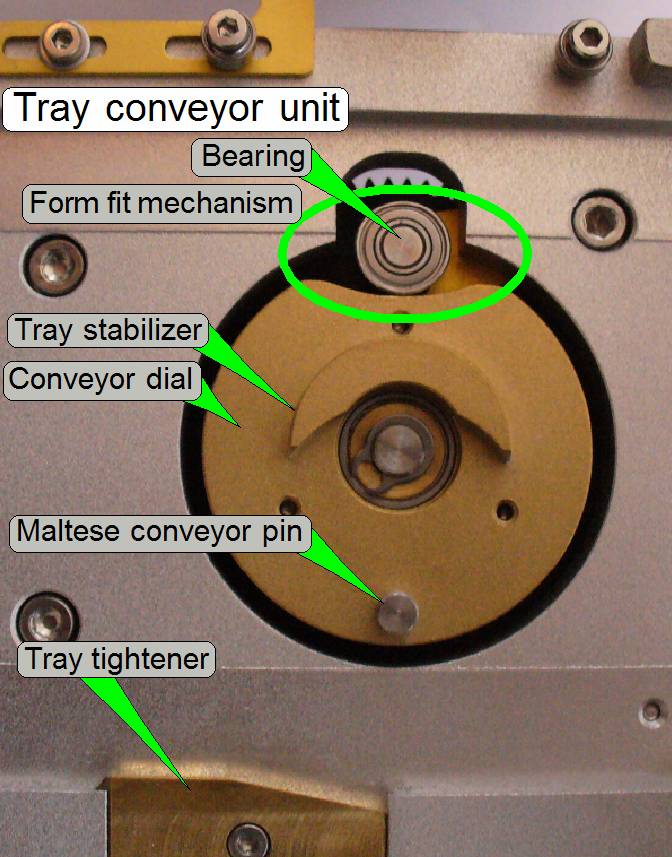 The tray conveyor (transport) unit is
designed to move the first slide bay from the tray insert position to the slide
insert position, slide positions forward or backward as desired and to eject
the tray. The principle of the movement is the Maltese cross, it transforms
rotation into steps. Furthermore, the form fit mechanism moves the slide loader
and the support plate upward or downward as needed for the appropriate slide
insert or remove action or other, possible movements.
The tray conveyor (transport) unit is
designed to move the first slide bay from the tray insert position to the slide
insert position, slide positions forward or backward as desired and to eject
the tray. The principle of the movement is the Maltese cross, it transforms
rotation into steps. Furthermore, the form fit mechanism moves the slide loader
and the support plate upward or downward as needed for the appropriate slide
insert or remove action or other, possible movements.
All the movements are software controlled, via
the number of steps, done by the stepper motor.
If the manual
scan method is used, the tray positions and actions are reached via software
buttons.
If the automatic
scan method is used, the tray is inserted manually and, if the scan operation
of the actual slide is finished, the next bay position is selected
automatically. If a slide is present, the slide will be inserted into the
specimen holder, if not, the tray is automatically moved to the next slide bay,
until the presence of a slide is detected.
The tray
transport unit is driven by a stepper motor via a gear. One revolution of the
conveyor dial is done in exact 19200 motor steps (6 revolutions of the motor’s
rotor). With the help of the Maltese conveyor pin and the tray stabilizer, the
tray is moved safely from slide bay to slide bay. Within one revolution of the
conveyor dial, the next or previous slide bay is reached.
See also: PCON_Power_control,
USB Controller and Addresses
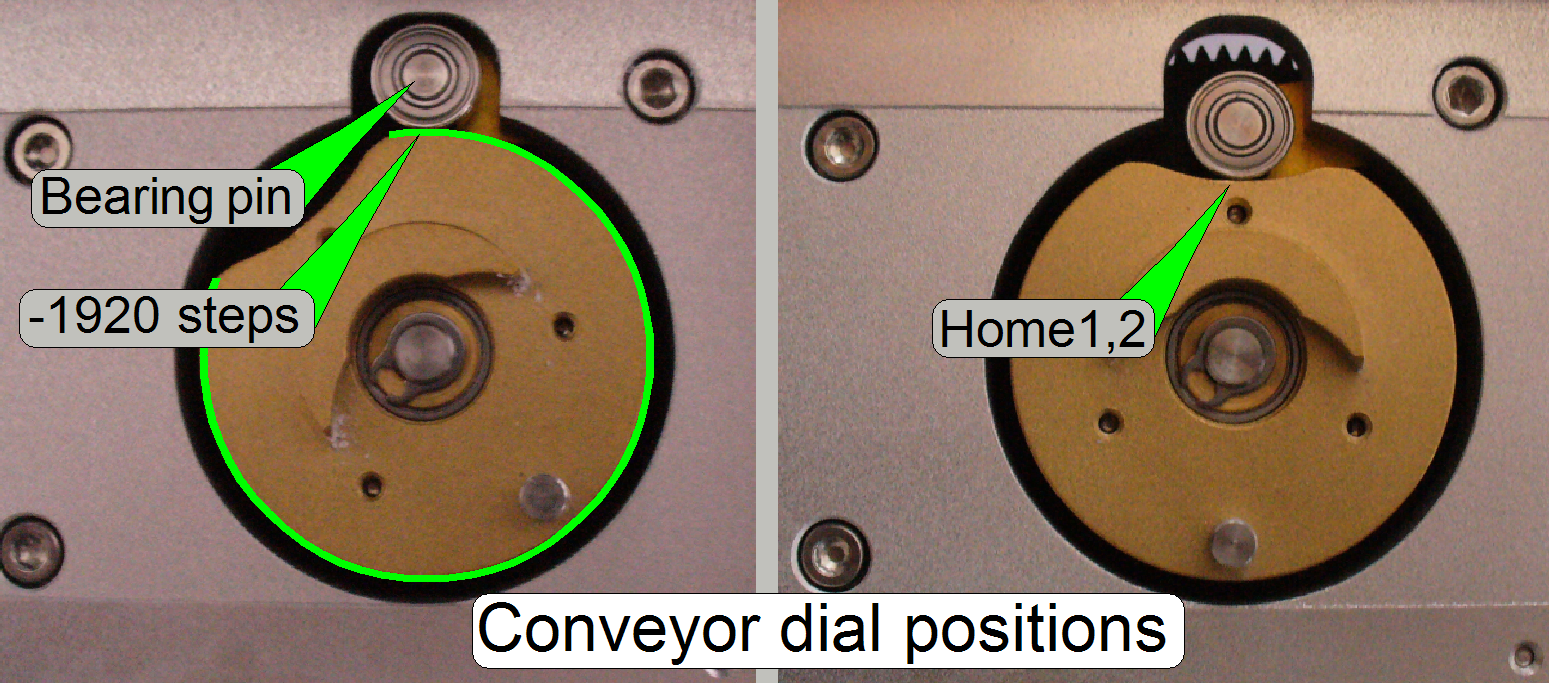 The mechanics, driven by the form fit mechanism
is so constructed, that the support plate and the slide loader moves always in
opposite directions. If the bearing pin stays more away from the center of the
conveyor dial (-1920 steps), the slide loader stays upward and the support
plate downward; this happens, if the X-Y-stage is moved and also, if the tray
is moved (any position of the perimeter, shown in green).
The mechanics, driven by the form fit mechanism
is so constructed, that the support plate and the slide loader moves always in
opposite directions. If the bearing pin stays more away from the center of the
conveyor dial (-1920 steps), the slide loader stays upward and the support
plate downward; this happens, if the X-Y-stage is moved and also, if the tray
is moved (any position of the perimeter, shown in green).
If the slide is
moved, the slide loader stays down and is able to touch the slide by the inner
or outer finger as required for the actual action; meanwhile the support plate
stays up and touches the slide from beneath, the conveyor dial stays in the
Home1,2 position (or a multiple number of -19 200 steps).
If a slide insert
or remove action is in progress, but there is no connection with the slide (the
slide loader moves backward after slide insertion or the slide loader moves
forward before removing the slide) the conveyor dial is moved by -1920 steps
from its home position; in this position the slide loader is up and the support
plate is down, but the tray is not attached yet by the Maltese conveyor pin, so
the tray is not moved yet.
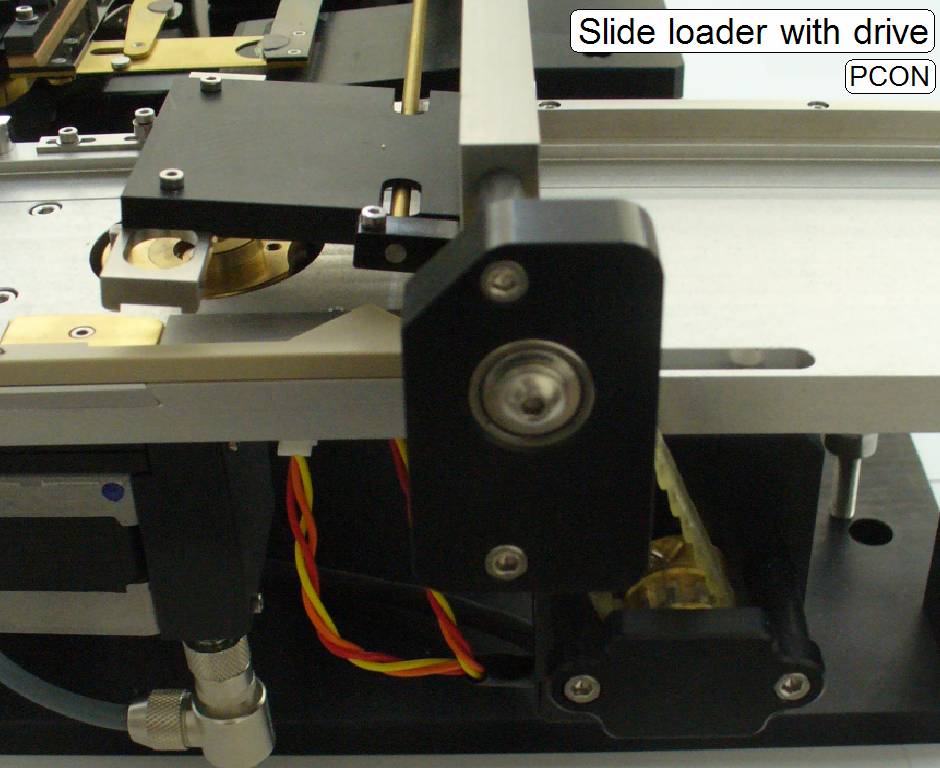
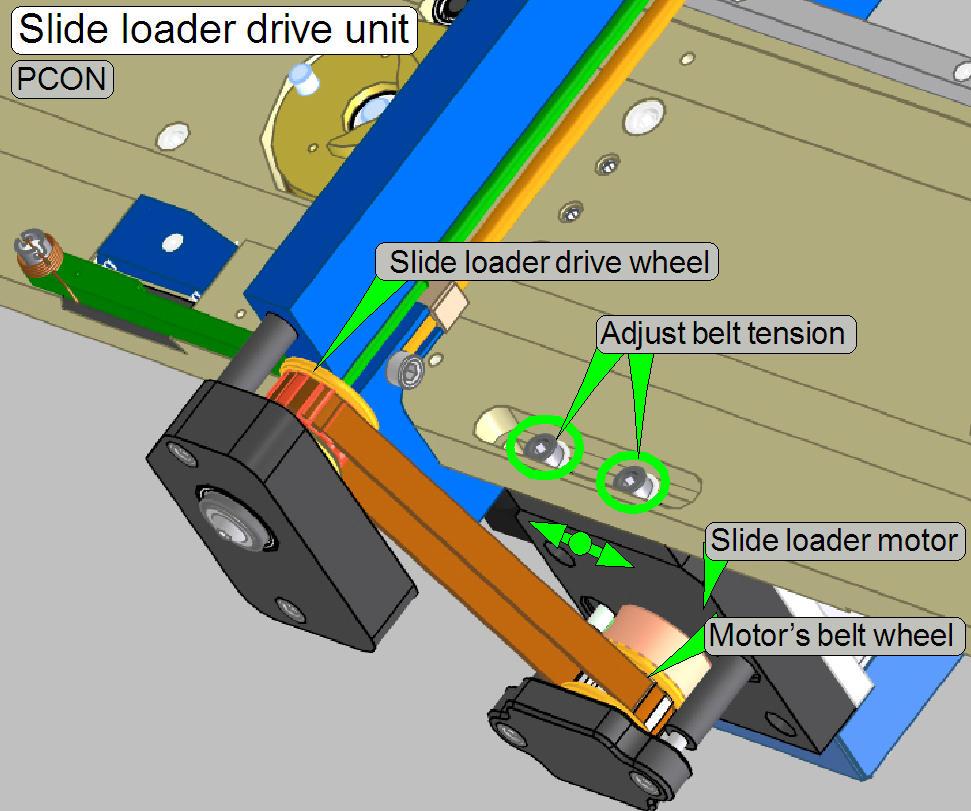 The stepper motor of the slide loader unit
got a new position as shown; therefore a belt drive was realized.
The stepper motor of the slide loader unit
got a new position as shown; therefore a belt drive was realized.
·
The
transmission of the belt wheels is realized by 1:1
·
The
tension of the belt is not critical, but do not tighten the belt too much!
See also: PCON_Power_control,
USB Controller and Addresses
Slide
loader and support plate mechanics
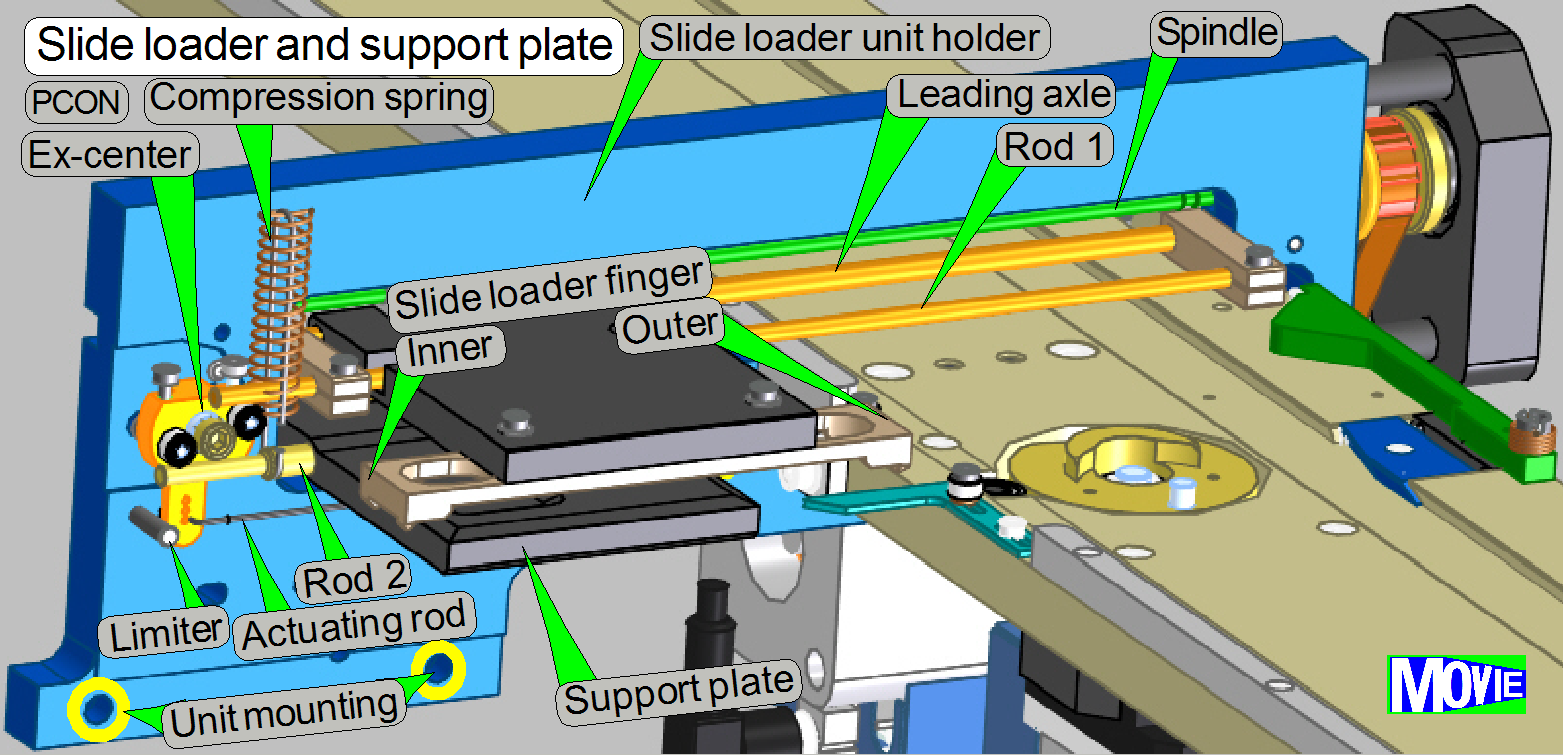 The slide loader mechanics is used to move
the slide loader from its Home position; this position is over the tray, to the
specimen holder, to insert a slide. This mechanics is driven by a stepper motor
and the information via the cable CON7.
The slide loader mechanics is used to move
the slide loader from its Home position; this position is over the tray, to the
specimen holder, to insert a slide. This mechanics is driven by a stepper motor
and the information via the cable CON7.
The transport
spindle is connected directly to the axle of the stepper motor.
The mounting of
the support plate is realized with an axle bearing, so the support plate
becomes moveable with the help of the “Rod
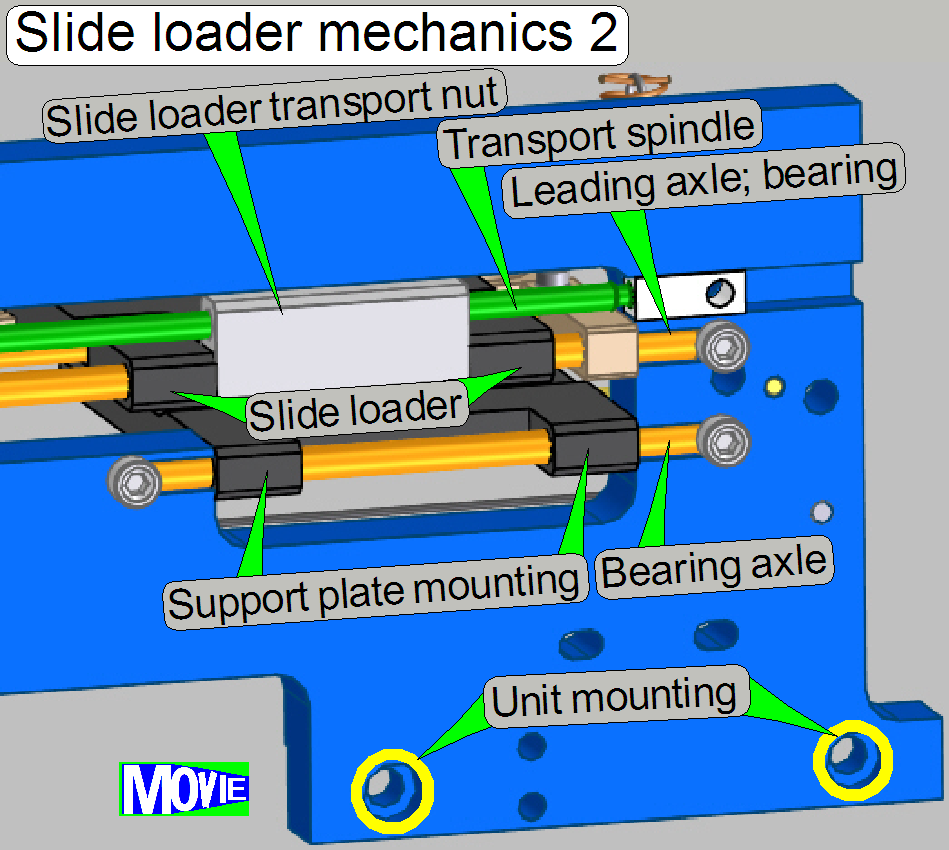 The same mounting solution is used for the
slide loader movement, but its bearing and leading axle is longer. If the slide
loader is driven by the transport spindle via the transport nut, the entire
slide loader moves on this axle from its Home position to the specimen holder
and back, to the position over the tray.
The same mounting solution is used for the
slide loader movement, but its bearing and leading axle is longer. If the slide
loader is driven by the transport spindle via the transport nut, the entire
slide loader moves on this axle from its Home position to the specimen holder
and back, to the position over the tray.
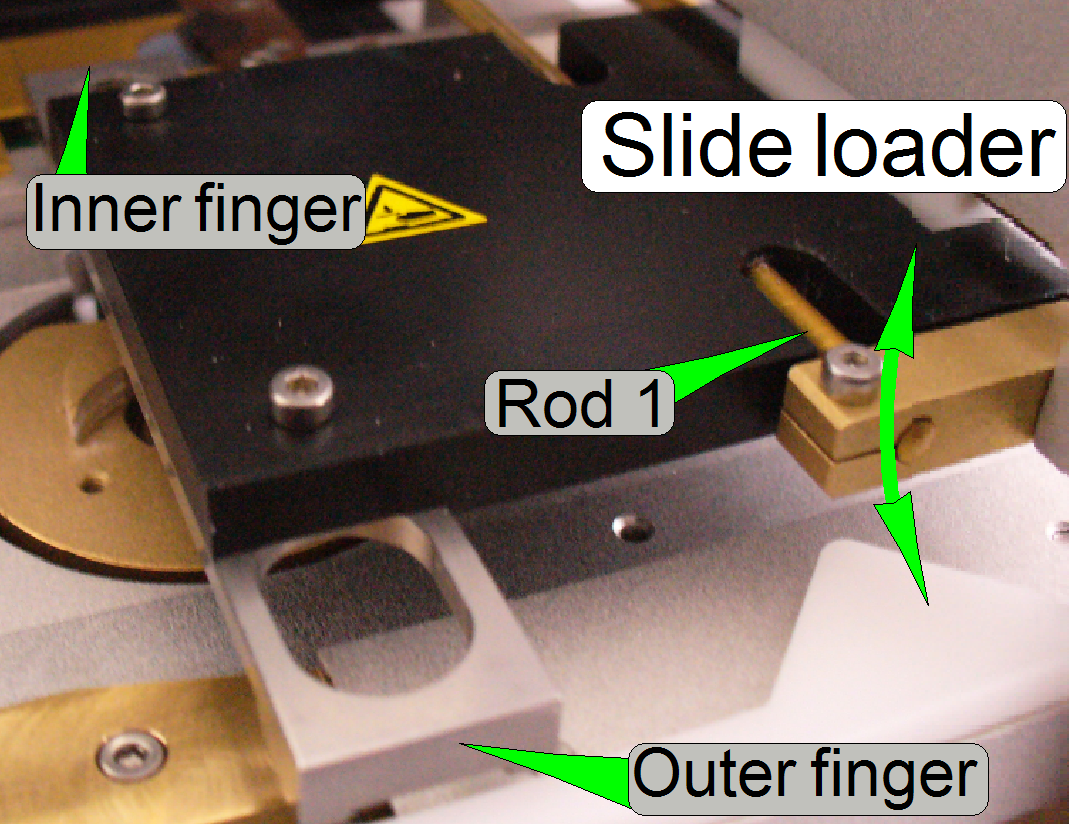 The entire slide
loader can be lifted up,
(for all movements, except slide movements) and can be lowered down (for slide
movements) with the help of the “Rod
The entire slide
loader can be lifted up,
(for all movements, except slide movements) and can be lowered down (for slide
movements) with the help of the “Rod
The slide loader
mechanics should be kept clean. The slide loader mechanics adjustment is reduced
to the adjustment of the slide loader and support plate spreading mechanism;
see also the chapter “Setup and adjustment procedures”.
Setup and adjustment procedures
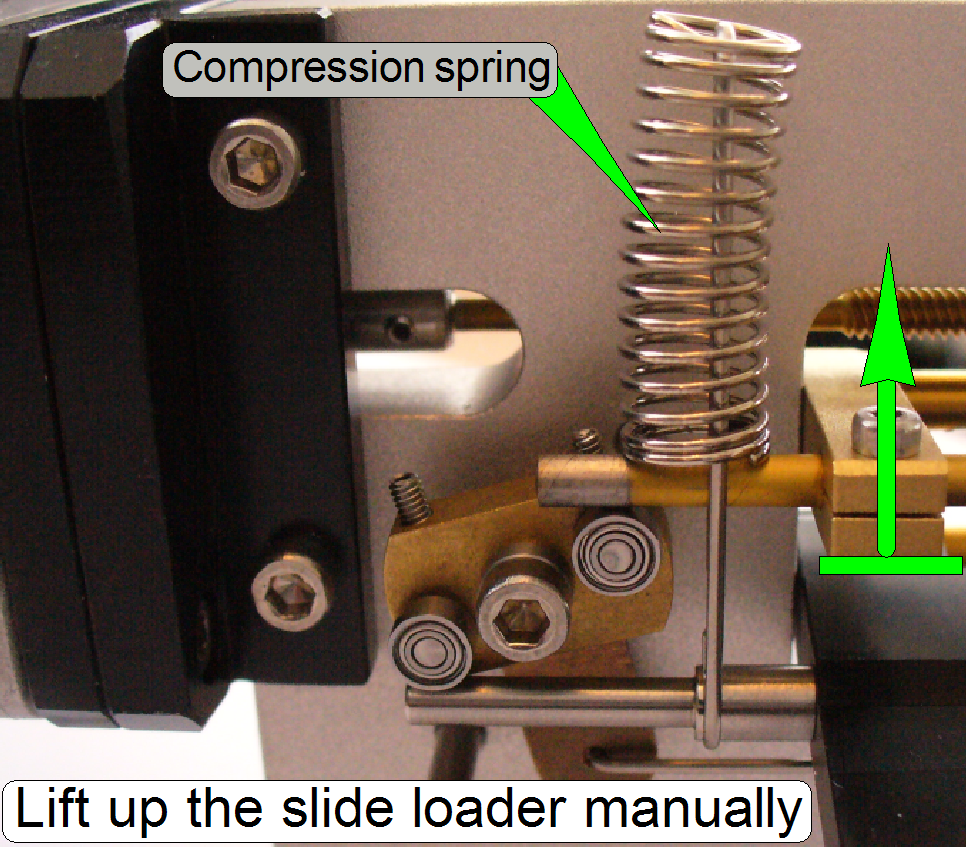
 If the slide loader needs to be lifted up manually, please touch
the mechanical mounting of the “Rod
If the slide loader needs to be lifted up manually, please touch
the mechanical mounting of the “Rod
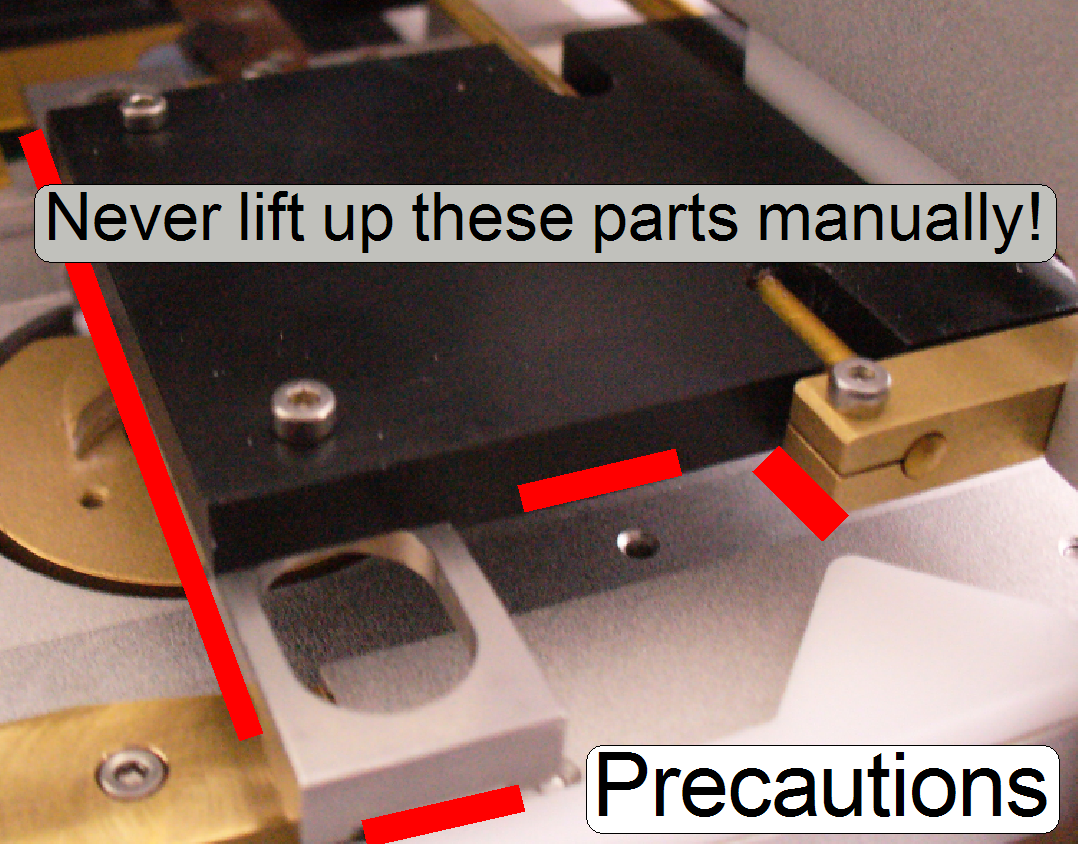
- Never lift up the slide loader on the
slide loader side, because the mechanics could be bend or deformed!
- If the slide loader mechanics is
deformed, the slides can not be inserted or removed safely!
§ Never execute
the commands Home1,2 for the tray loader with inserted tray!
If a try is inserted and
the commands Home1,2 must be executed for the tray loader, remove the tray
first by moving the tray backward with the service program and the button
+19200 steps or by powering off the power supply and turning the tray loader
gear wheel by hand (from beneath). If the tray is fully removed from the tray
leader, the command Home2 for the tray loader stepper motor can be executed
safely.
 To take always care on the focus pin, set the focus position to -300 steps if the
X-Y stage should be moved with the service program!
To take always care on the focus pin, set the focus position to -300 steps if the
X-Y stage should be moved with the service program!
This way, the focus pin is as far as possible away from the specimen
holder; otherwise, the focus pin will be battered during X-Y-stage movements,
even if collision with the specimen holder occurs. A well battered focus pin
ensures trouble during focusing of many samples!
Set
the focus position to -300 or +1300 steps:
Set the tray loader motor
to the position -1920 steps, so the slide loader and the support plate is
spread and does not collide with the X-Y-stage while it is moving!
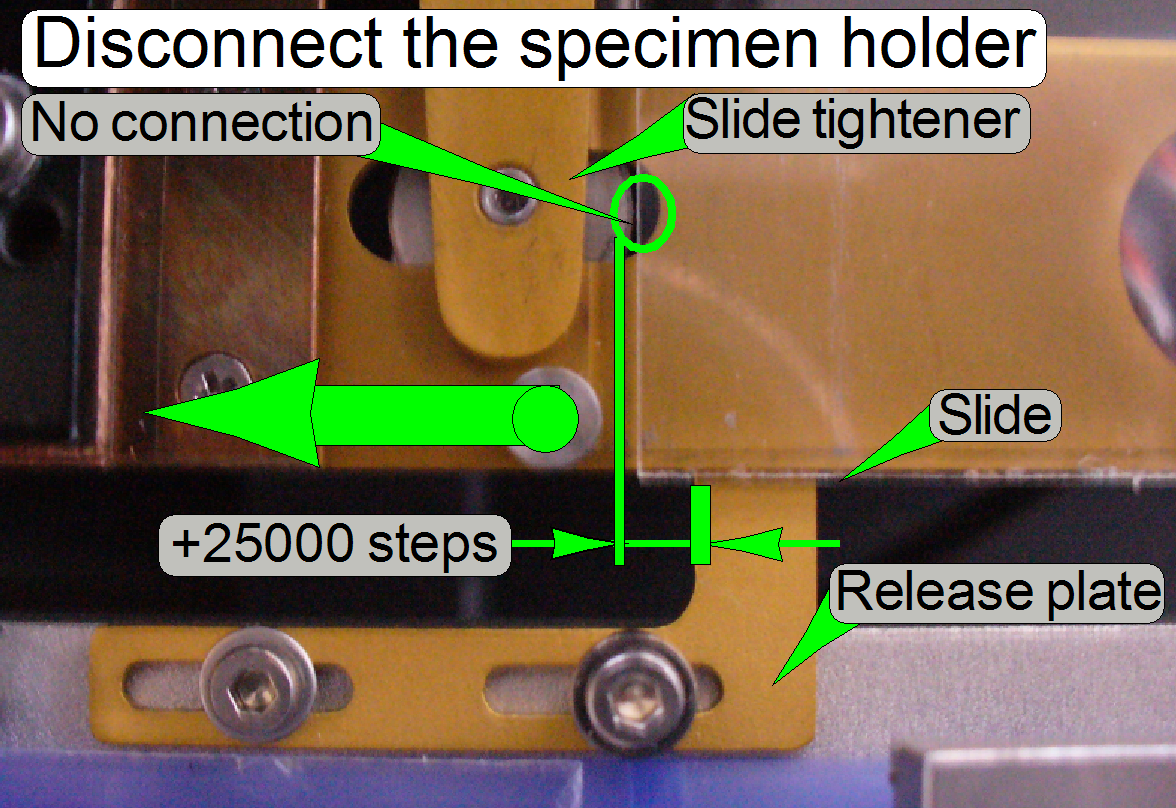
Move the X-Y stage by at least 25 000 steps in +X-direction! This way,
the slide tightener is not connected with the release plate and the focus pin
movement can take effect. Set the focus position; then set the X-stage to any
desired position.
- Please use always a
protective eye wear if the slide loading test is in progress and
you are looking closely at the loading procedure! It may happen that a
slide can fly in peaces during the process, even if the adjustment is
incorrect!
General techniques
A.
All
the movements of the X-Y-stage, tray- and slide loader and the focus unit are
done by using the service program, except explicitly specified otherwise.
B.
All
the parameter values to be actualized are found in the file MicroscopeConfiguretion.ini sections [HardwareLimits], [SlideLoading] and
[MagazineLoader]. Use always
an accuracy of 100 steps, except explicitly specified otherwise!
C.
Negative step numbers or values are
starting with a minus (-) sign in the *.ini files!
D.
The
focus position should never be set in the specimen holder’s X-Home1,2 and
Y-Home1,2 position, because the action has no effect (if the focus pin moves
downward) or the focus pin (4:1 divider) may be strained (if the focus pin
moves upward)! Instead go forward to +25 000 steps in +X-direction to
disconnect the specimen holder from the release plate; set the focus position
and move the specimen holder back by X=-25 000 steps if necessary.
E.
Do not hesitate to remove the turret
unit or turret plate (if the scanner will be used without the fluorescence
option) during the adjustment procedure is done, even if a full adjustment
should be done; so it is easier to reach certain places.
F.
Remove the entire tray- and slide
loader unit if brightfield illumination adjustments and adjustments of the
optical path are done; otherwise certain places can not be reached.
Adjustments are done in the following sequence
1.
Check the
physical limits of the tray loader
2.
Adjust the home
position of the conveyor dial and tray loader motor
3.
Adjust the length of
the actuating rod
4.
Adjust the
tray sensor position.
5.
Adjust the
slide sensor position.
6.
Define
the value of the parameter MidiFeederArmMin, MidiFeederArmMax
7.
Define
the value of the parameter MidiSlideFeederArmTrayMovingPosition
8.
Adjust
the height of
the slide loader.
9.
Adjust
the height of
the support plate.
9a. Check or adjust the slide bay
position.
10. Define the value of the parameters “InsertSlidePositionX”
and “InsertSlidePositionY1”
11. Adjust the position
of the release plate.
12. Define the value of the parameter “MidiSlideFeederArmSlideLoadingStartPosition”
13. Define the value of the parameter “MidiSlideFeederArmSlideLoadingEndPosition”
14. Define the value of the parameter MidiXPositionToFixTheSlide
15. Define the value of the parameter “MidiSlideFeederArmSlideUnLoadingStartPosition”
16. Define the value of the parameters “RemoveSlidePositionX1”
and “RemoveSlidePositionY”
1. Check the physical
limits of the tray loader
These are predefined values and should be checked or
set only; adjustments are not required.
The parameter “MidiTrayMoverMin” is set to 0 and the parameter “MidiTrayMoverMax”
is set to 233 000.
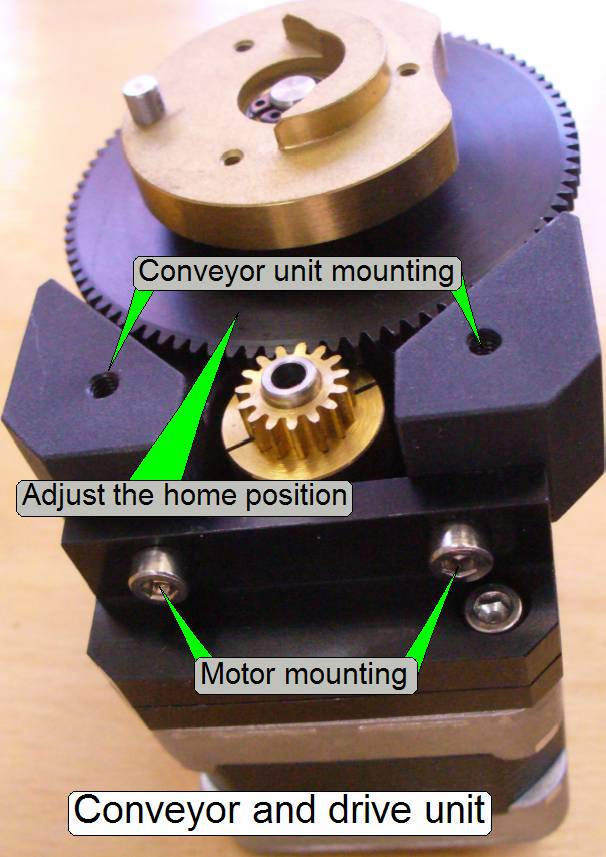
2. Adjust the
home position of conveyor dial
and tray loader motor
a. 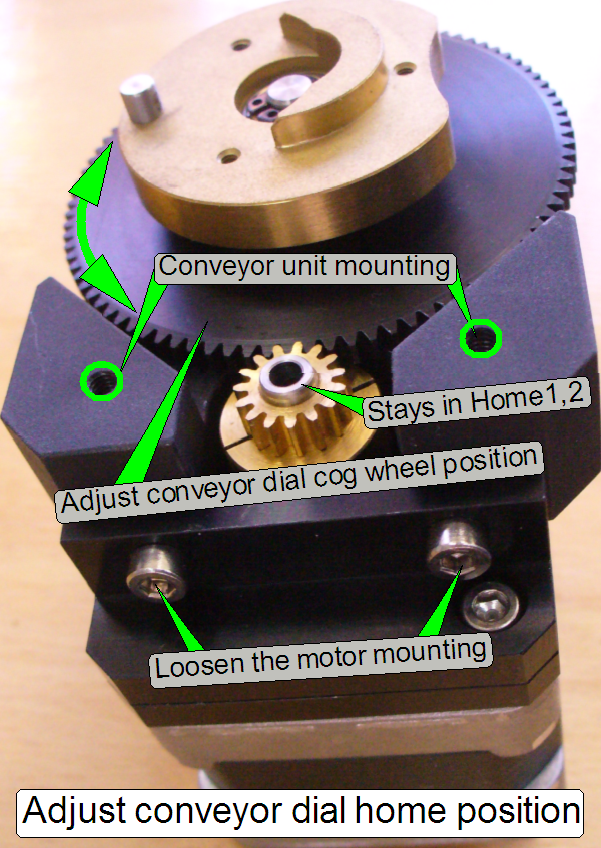
 Set the stepper motor of the conveyor unit
to Home1,2 position, without a tray inserted!
Set the stepper motor of the conveyor unit
to Home1,2 position, without a tray inserted!
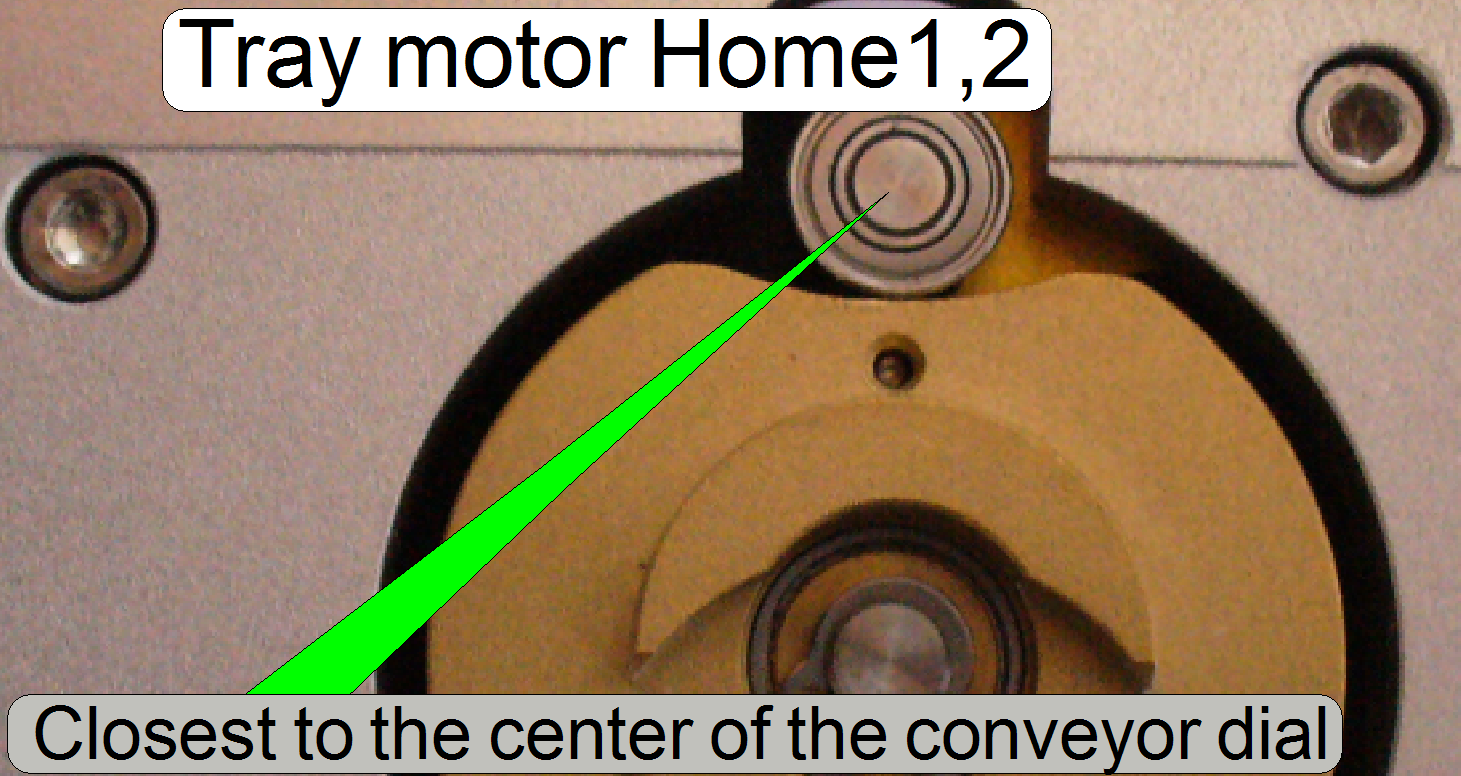
b. Adjust the conveyor dial position in
relation to the motor gear wheel by loosening the mounting bolts of the motor
(found from beneath) and disconnect the cogs of the gear wheels. Adjust the
position of the gearwheels to each other so, that the ball bearing is in the
smallest elongation; nearest to the center of the conveyor dial. Rotate always
the conveyor dial, never the motor axle!
c. After the mounting bolts are tightened, check
the engagement and connection between rotor- and gear wheel!
d. Set the tray motor position to Home1,2
again and check the entire adjustment.
e. Repeat the adjustment from step “a” if
necessary.
3. Adjust the length of the actuating rod
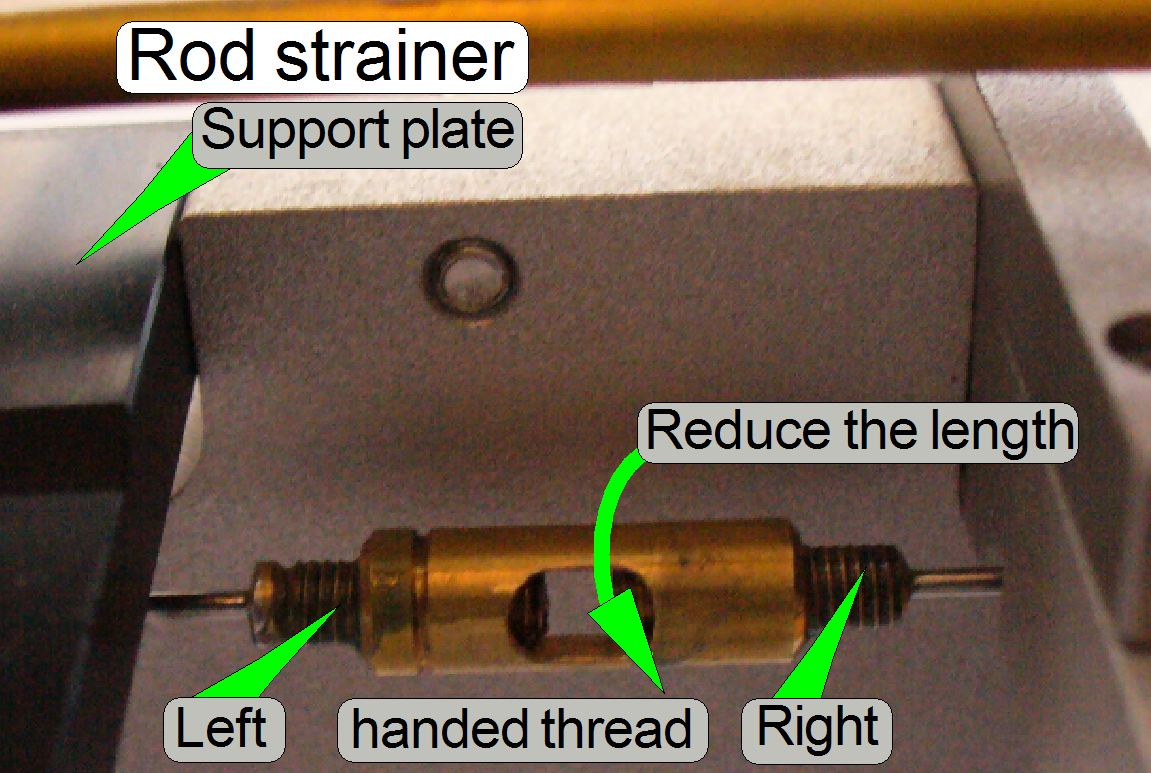
 Adjust the length of the actuating rod by
screwing the rod strainer with the
Adjust the length of the actuating rod by
screwing the rod strainer with the
4. Adjust the tray sensor position
 This adjustment assumes, that the correct
slide bay position for the slide load operation is found; see also “Check or
adjust the slide bay position”.
This adjustment assumes, that the correct
slide bay position for the slide load operation is found; see also “Check or
adjust the slide bay position”.
The goal of this
adjustment is, to set the tray insert position so, that the sensor is checked
if the tray is fully inserted and it can be loaded safely.
If the sensor
position is wrong, the inserted tray will not be recognized or, if the tray is
recognized, and the tray is to far from the conveyor dial, the Maltese pin can
not engage the appropriate tray mechanics.
a. Set the conveyor dial to Home1,2 position.
b. Insert the tray until it stops.
c. Move the hall sensor of the tray “CF01E” away from its
action position and then carefully toward to the action position until the service program
shows even the active state of the sensor and tighten the mounting bolt.
|
Tray and slide sensor |
||
|
Sensor |
Name |
Label |
|
Tray |
TMC-HAL1(2) |
CF01E |
|
Slide |
TMC-HAL1(1) |
CF01F |
Check
the correct position
Move the tray carefully backward until the tray
sensor is inactive and by carefully inserting the tray again, stop the movement
if the sensor goes even active.
Now rotate the conveyor dial with the cog wheel and
the motor cable disconnected. The Maltese pin should engage the appropriate
part of the tray smoothly and safely. The gap between conveyor dial and tray
should be less then
·
The
gap can be checked if the tray is pushed from the acting position of the sensor
(the sensor shows even the active state) toward the conveyor dial; this
movement length should be less then 2mm. please repeat this check more times.
5. Adjust the slide sensor
position
 Adjust the sensor position without slide
in the sensed slide bay!
Adjust the sensor position without slide
in the sensed slide bay!
The sensor state
should show the empty slide bay safely.
a. If an adjustment is needed, modify the Hall sensor position of the
slide sensor “CF01F”,
see also the paragraphs “Tray
sensor” and “Slide
sensor” above.
b. The sensor position is correct if the presence
or not presence of the shortest possible slide is clearly detected. Check this
behavior with the service program
and by moving the sensor arm manually also.
6.
Define the values of the parameters “MidiFeederArmMin” and “MidiFeederArmMax”
These parameters
are defining the limit positions of the slide loader.
Find
the negative limit for the slide loader mechanics (“MidiFeederArmMin”)
a. Set the slide loader motor to Home1,2.
b. Go forward to the slide loader motor
position -1200 steps.
c.
Go
backward +1200 steps.
d. Press Home1 (only). There should be not
more then +-2 steps difference to Home1. If there are more steps lost, decrease
the actual absolute number of steps by 100 and repeat from step “a”. In the
steps “b” and “c” use the actual absolute number of steps!
e. If there are not more then 2 steps
difference to Home1, increase the number of steps by 100 and repeat from step
“a”. In the steps “b” and “c” use the actual absolute number of steps!
f.
The
negative limit is found correctly if the motor movement has no steps lost and
the actual absolute number of steps, increased by 100 would produce lost steps.
The found negative limit can differ by more 100 steps from unit to unit. The
reason is the tolerance of the components.
g. Update
the value of the parameter “MidiFeederArmMin” with the found number of the actual
steps (negative signed step numbers are starting with a minus (-) sign!) in the
file “MicroscopeConfiguration.ini”
section [HardwareLimits] and save the file.
Find the positive limit of the slide
loader mechanics (“MidiFeederArmMax”)
The value of the parameter “MidiFeederArmMax” is always set to 91 000 steps.
Check the found limits by moving the slide loader without slide and using the number of steps, used as parameter value in the file “MicroscopeConfiguration.ini” section [HardwareLimits]. Lost steps must not occur.
7. Define the value of the
parameter “MidiSlideFeederArmTrayMovingPosition”
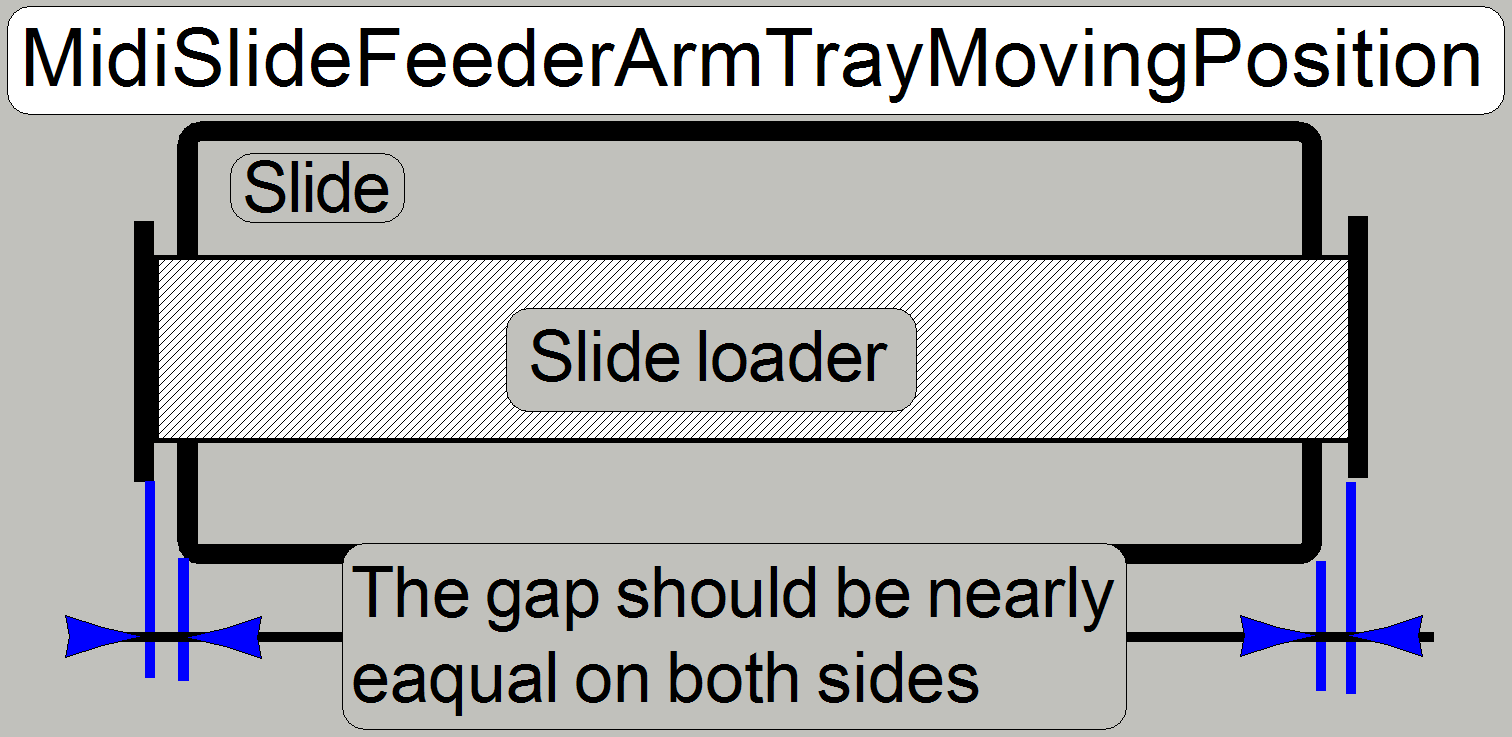 This parameter value defines the position
for the slide loader if the tray is moved and the distance between slide loader
inner and outer finger to the short edges of the slide in motor steps. Define this
value by moving the slide loader motor and lowered down slide loader so, that
the distance between slide loader finger and slide is nearly equal on both
sides of the largest possible slide. Update the parameter value with the found,
new value and save the file.
This parameter value defines the position
for the slide loader if the tray is moved and the distance between slide loader
inner and outer finger to the short edges of the slide in motor steps. Define this
value by moving the slide loader motor and lowered down slide loader so, that
the distance between slide loader finger and slide is nearly equal on both
sides of the largest possible slide. Update the parameter value with the found,
new value and save the file.
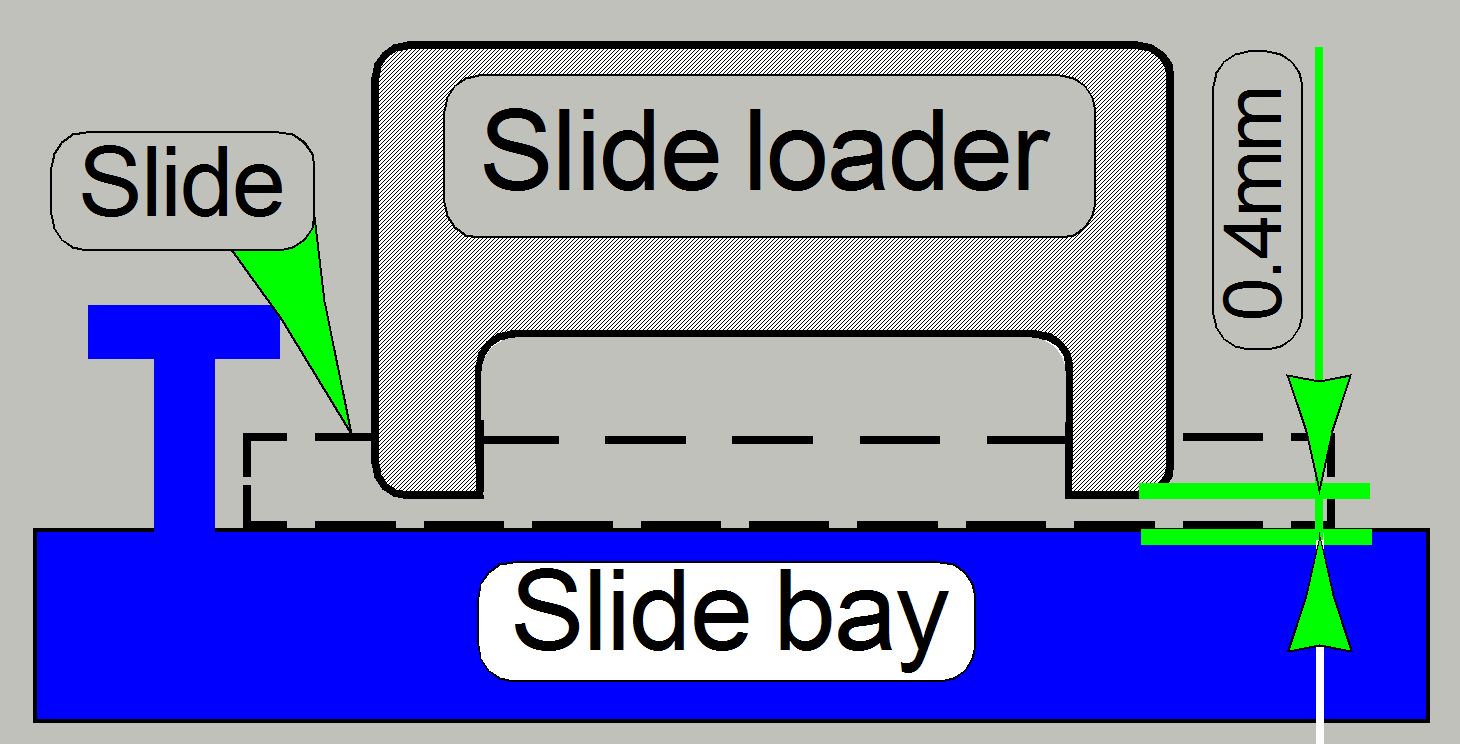
8. Adjust the height of the slide loader
The height of the
slide loader is adjusted well, if a very small gap exists between the slide
loader fingers and the tray surface (about
 Please keep in mind that the slide insert procedure is always done
in the focus position -300 steps and the slide remove procedure is always
done in the focus position +1300 steps.
Please keep in mind that the slide insert procedure is always done
in the focus position -300 steps and the slide remove procedure is always
done in the focus position +1300 steps.
Check the gap
a.
Set
the X-Y-stage to the X and Y Home1,2 positions and load an empty tray.
b.
Set the focus motor
to the position -300 steps; see also above “Precautions” and “To set the focus
position”
c.
Move
the slide loader to the position +20 000 steps.
d.
Check
the gap between slide bay surface and the claws of the outer finger. The gap
should be less then
e.
If
the surface of the slide bay is touched or the gap is too much, the height of
the slide loader has to bee adjusted.
f.
Next
we send the slide loader forward again by 40 000 - 60 000 steps until the
outer finger is nearest to the specimen holder but still over the tray. There
should be nearly the same gap size as before.
· If the gap is not equal on both sides of
the slide bay, the slide loader mechanics may be deformed.
g.
Set
the focus motor to the position +1300 steps.
h.
Insert
the slide loader without a slide into the specimen holder and check the gap
between outer finger and specimen holder surface. There should be a gap of
·
Check
the correct mounting position (Seat and Shoulder) of
the entire tray- and slide loader unit, if there is no gap or the gap is too
much!
Adjust
the height of the slide loader
- Please keep in mind that the slide insert procedure is
always done in the focus position -300 steps and the slide remove
procedure is always done in the focus position +1300 steps.
j.
 Set the X-Y-stage to the X and Y Home1,2
positions and load an empty tray.
Set the X-Y-stage to the X and Y Home1,2
positions and load an empty tray.
k.
Move the
slide loader to the position +20 000 steps.
l.
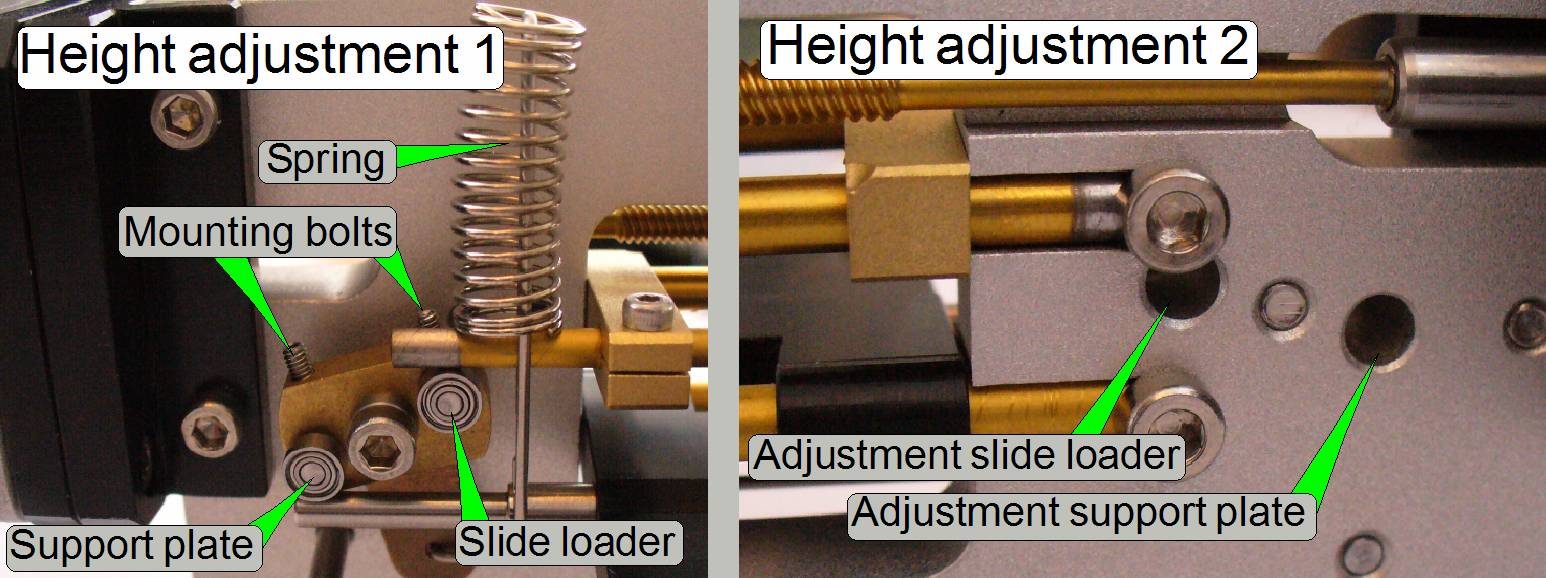
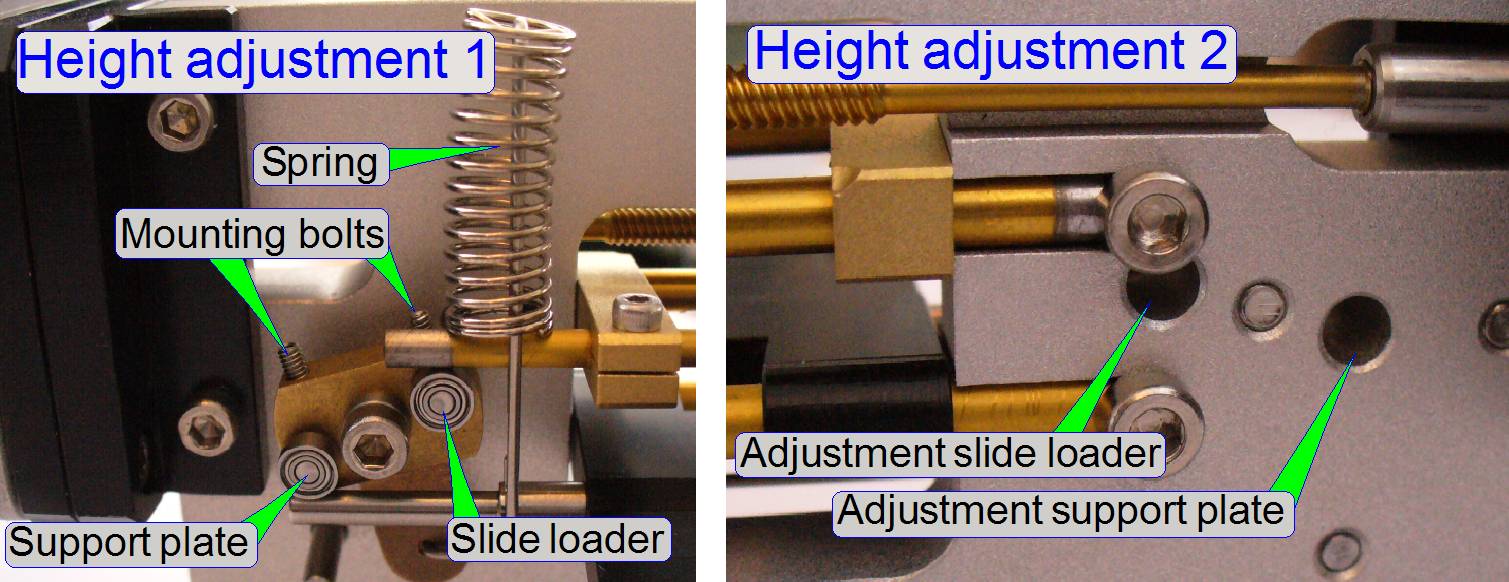
Insert
the 1.5 hex-key wrench for the ex-center of the slide loader adjustment hole
(see Height adjustment 2) and loosen the slide loader’s mounting bolt with a
0.9 hex-key wrench (see Height adjustment 1).
m.
By
rotating the ex-center with the 1.5 hex key wrench the slide loader moves
upward or downward respectively (see height adjustment 2).
n.
Adjust
the height of the slide loader so, that the gap between the lower part of the
slide loader to the surface of the tray’s slide bay is about
o.
Check
the gap between slide loader and the tray’s slide bay surface as described
above in this chapter “To check the gap”.
p.
Check
the gap between outer finger and the surface of the specimen holder if the focus position
is 2400 steps (if the slide remove procedure is in progress). There should be a
gap of
q.
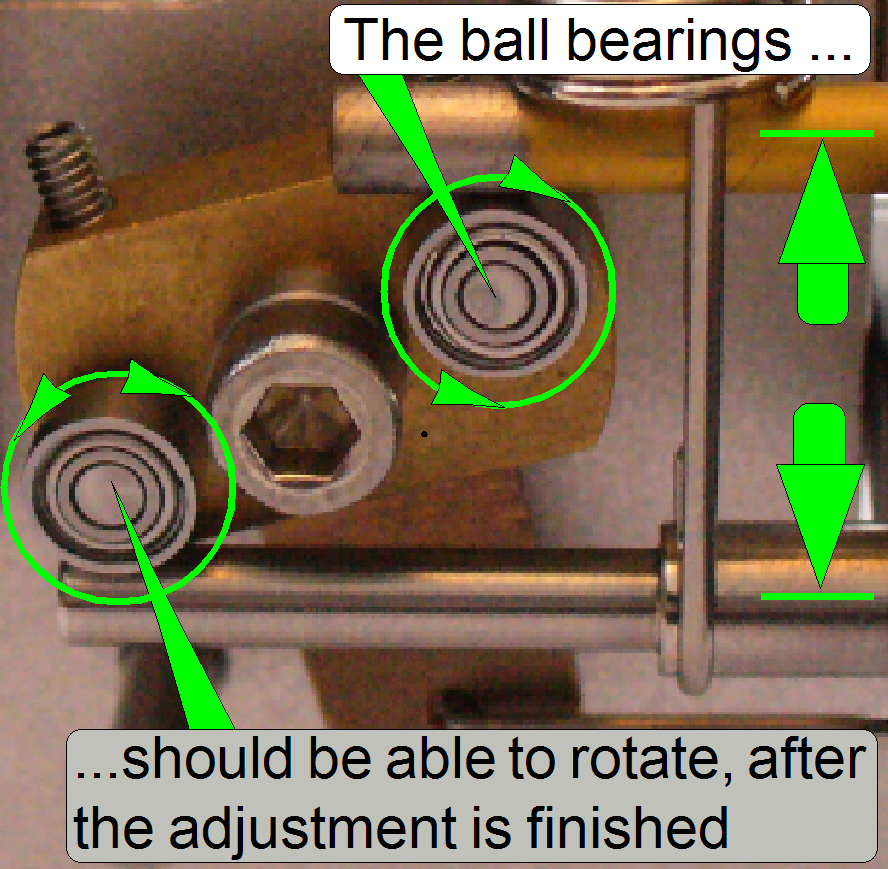 Check the movement of the ball bearing. If
the slide loader will be moved upward, the ball bearing must rotate! If the
ball bearing of the slide loader does not rotate, find the correct position by
rotating the ex-center into the opposite position and repeat the entire
adjustment.
Check the movement of the ball bearing. If
the slide loader will be moved upward, the ball bearing must rotate! If the
ball bearing of the slide loader does not rotate, find the correct position by
rotating the ex-center into the opposite position and repeat the entire
adjustment.
·
Move
the “Rod
9. Adjust the height of the support plate
The adjustment sequence is done similar to the
adjustment procedure of the slide loader.
- Please keep in mind that the slide insert procedure is
always done in the focus position -300 steps and the slide remove
procedure is always done in the focus position +1300 steps.
a. Load a tray with a slide in the first
slide bay.
b. Set the focus
motor to the position -300 steps; see also above “Precautions” and “To set the
focus position”
c. Set the specimen holder to the slide
insert position in X-and Y-direction.
d. Move the slide 45 000 steps toward the
specimen holder until the front of the slide is above the support plate.
e. Insert the 1.5 hex-key wrench for the
ex-center of the support plate adjustment hole (Height adjustment 2) and loosen
the support plates mounting bolt with a 0.9 hex-key wrench (Height adjustment
1).
f. By rotating the ex-center with the 1.5 hex
key wrench the support plate moves upward or downward respectively.
g. Adjust the height of the support plate so,
that the slide is even touched from beneath; tighten the mounting bolt.
h. The reached position is correct, if the
reflection on the slide slightly moves.
i.
This slide
should be fully unloaded then moved toward the specimen holder again by 80 000
steps. The slide should not collide with the edge of the support plate and
should fit inside the specimen holder the 3 slide studs without hitting them.
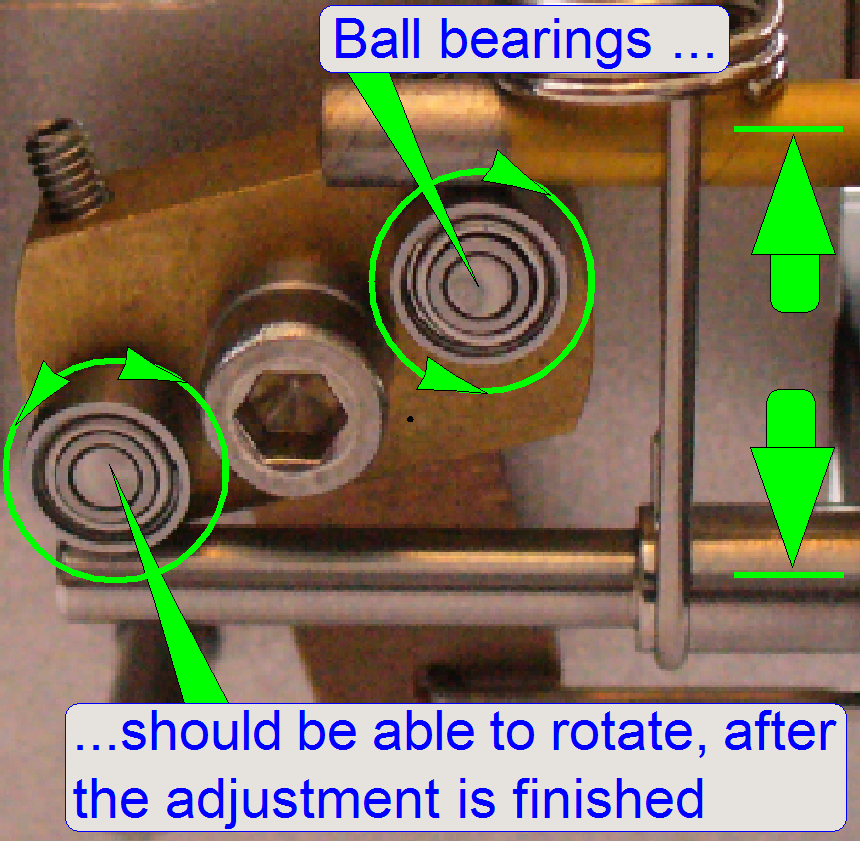
j.
Check
the movement of the ball bearing. If the support plate will be moved downward,
the ball bearing must rotate! If the ball bearing of the support plate does not
rotate, find the correct position by rotating the ex-center into the opposite
position and repeat the entire adjustment.
·
Move
the “Rod
Check the surface
quality of the slide studs.
When the slide is
loaded by hand it should be slightly pushed against the slide studs leading
surface so that it can be judged if the slide collides with a lump on the slide
leading part of the slide studs. If this occurs the stud should be replaced or
grinded by a qualified service technician.
Check the surface
quality, the functionality of the slide stud and the safe holding of the slide.
If the slide tightener holds the slide correctly, the slide must not be
moveable easily. The slide tightener is checked by moving it toward and away
from the slide gently. The movement should be easily and the spring has to be
firm enough. Push the slide tightener
always only sideward, never down- or upward because the specimen holder or the
parallelogram could be bend.
9a. Check and adjust the slide bay position
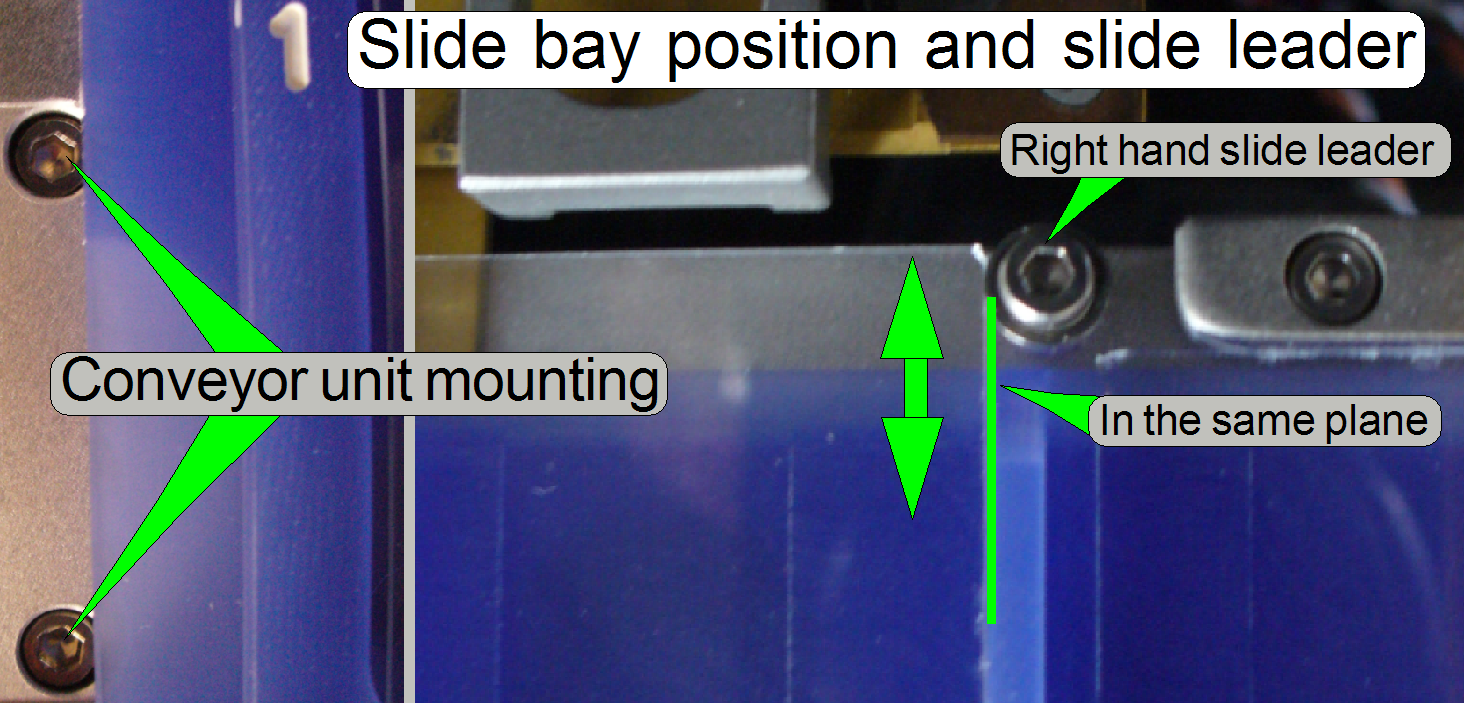 To ensure a proper slide loading
procedure, the right-hand edge of the slide bay has to be in the same plane as
the right-hand slide leader. If the slide is moved toward the specimen holder
on the right-hand edge of the slide bay, the slide leader has to be touched,
but hitting of the slide leader should not be felt.
To ensure a proper slide loading
procedure, the right-hand edge of the slide bay has to be in the same plane as
the right-hand slide leader. If the slide is moved toward the specimen holder
on the right-hand edge of the slide bay, the slide leader has to be touched,
but hitting of the slide leader should not be felt.
·
Check
this behavior in all slide bay positions of both trays.
·
The
conveyor unit position can be moved or adjusted only in a very small range.
·
If
the conveyor unit position was modified, check the correct movement of the try
and the tray sensor position again, see also “Adjust the tray
sensor position”!
Adjust the slide bay
position
a. Fill a tray with slides without cut
corners in each slide bay.
b. Insert the tray and check the plane of the
slide leader in relation to the right-hand side wall in the slide bay position
1.
c. If necessary, loosen the conveyor unit
mounting and bring the entire conveyor unit into the proper position and
tighten its mounting.
d. Remove the tray with the service program
and insert the tray again; check the easy and correct movement of the tray.
e. Check the plane in the slide bay positions
1, 6 and 12.
f.
If
the slide hits the slide leader or there is no contact between slide and slide
leader repeat from step “b”; find the optimum.
g. If the plane in the trays slide bay
positions 1, 6 and 12 is correct, check the plane in all slide bay positions
and check the other tray also.
10. Define the value of the parameter “InsertSlidePositionX” and
“InsertSlidePositionY1”
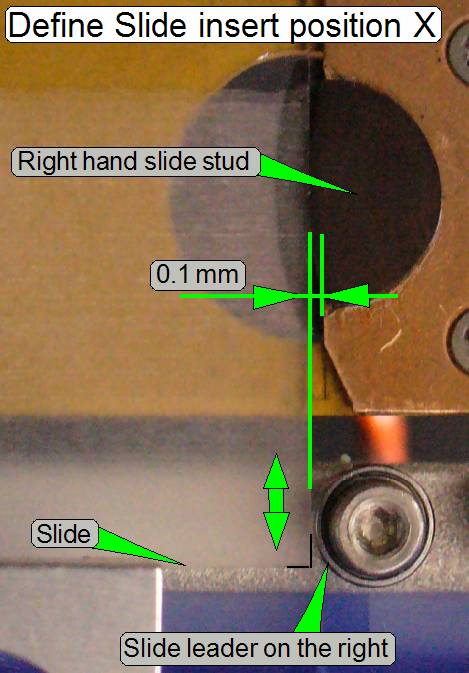 This parameter defines the X-Y stage
position for the slide loading procedure. This can be set by moving the X-stage
in the negative direction from Home1,2 by 100 steps. The adjustment is correct
if the slide can be inserted smoothly, and no collision occurs between the
inner right slide corner and the slide studs during slide insertion.
This parameter defines the X-Y stage
position for the slide loading procedure. This can be set by moving the X-stage
in the negative direction from Home1,2 by 100 steps. The adjustment is correct
if the slide can be inserted smoothly, and no collision occurs between the
inner right slide corner and the slide studs during slide insertion.
a.
Set
the focus position to 800 steps.
b.
Set
the X-Y-stage to X-Home1,2 and Y-Home1,2.
c.
Set
slide loader to Home1,2.
d.
Set
tray loader to Home1,2; without inserted tray!
e.
Insert
the slide of the maximal width in the first slide bay.
f.
Insert
the tray.
g.
Set
the tray motor -1920 steps forward to lift up the slide loader.
h.
Insert
the slide by hand so, that the slide leader and the inner slide stud are
touched at the same time.
i.
Set
the tray motor +1920 steps backward to lift up the support plate.
j.
By
moving the slide manually toward the bumper edge and return, the position of
the slide studs in relation to the slide leader can be checked.
k.
Adjust
the X-position of the X-Y-stage so, that both slide studs and the slide leader
are in the same plane.
l.
Add
to the found absolute value 100 steps (=0.1 mm) and update the value of the
parameter “InsertSlidePositionX” and
save the file. The value is often found in the range of
-300 to -800 steps.
m.
The
value of the parameter ”InsertSlidePositionY1”
is always =0.
n.
Check
the correctness of the adjustment during the slide insert procedure.
11. Adjust the position of the
release plate
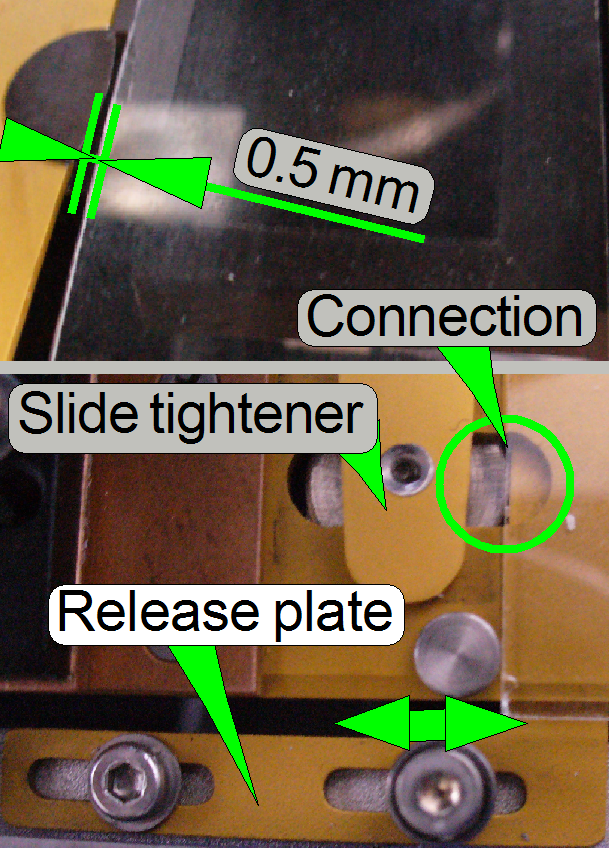
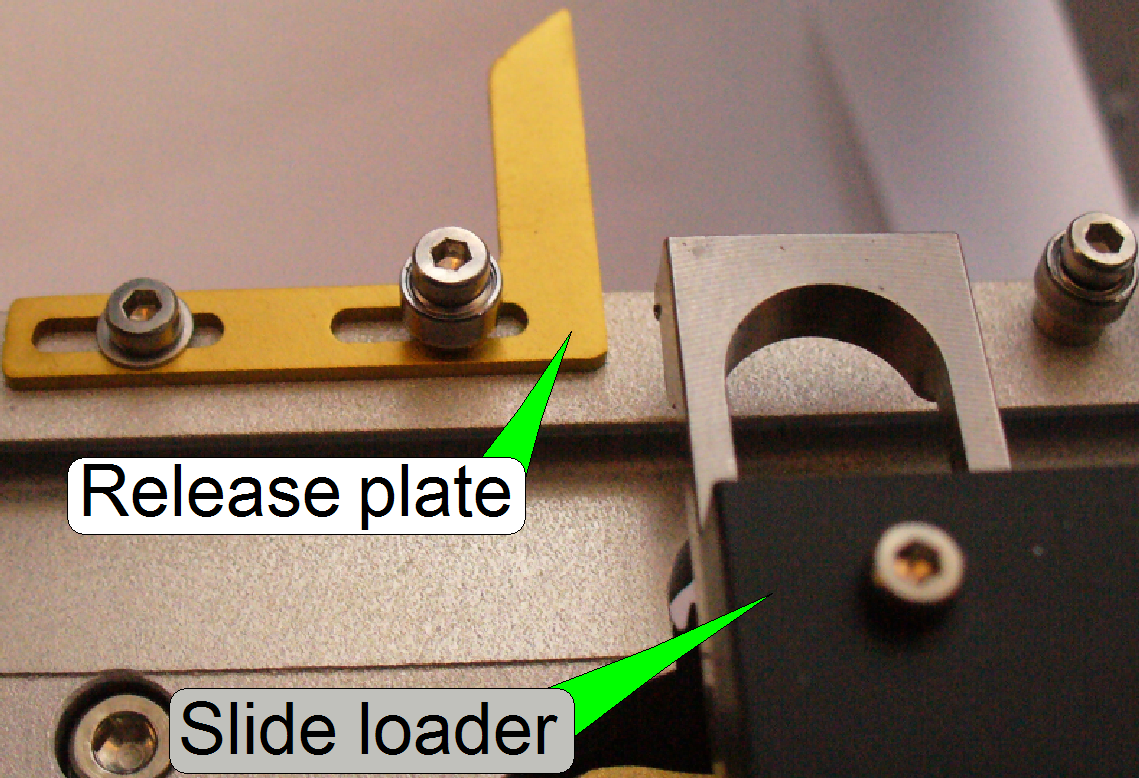 The release plate ensures the correct
disconnection between slide studs and slide for the slide insert and slide
remove procedure. In the slide insert position X and Y the release plate is
connected with the slide tightener and this is moved away from the slide.
The release plate ensures the correct
disconnection between slide studs and slide for the slide insert and slide
remove procedure. In the slide insert position X and Y the release plate is
connected with the slide tightener and this is moved away from the slide.
a.
 Insert the slide of the maximal allowed
width into the tray.
Insert the slide of the maximal allowed
width into the tray.
b.
Insert
the tray.
c.
Set
the tray motor -1920 steps forward to lift up the slide loader.
d.
Set
the X-Y-stage to X-Home1,2 and Y-Home1,2.
e.
Set
the X-Y-stage to the insert position X by using the value of the parameter ”InsertSlidePositionX”.
f.
Insert
the slide manually.
g.
Set
the tray motor +1920 steps backward to lift up the support plate.
h.
Loosen
the release plate.
i.
Move
the release plate to the left until a gap of nominal
j.
Tighten
the release plate.
k.
The
slide should be moveable between the slide studs but should not fall down if
the support plate is moved downward.
l.
Check
the correctness of the adjustment during the slide’s insert procedure; and with
the smallest slide also.
12. Define the value of the parameter “MidiSlideFeederArmSlideLoadingStartPosition”
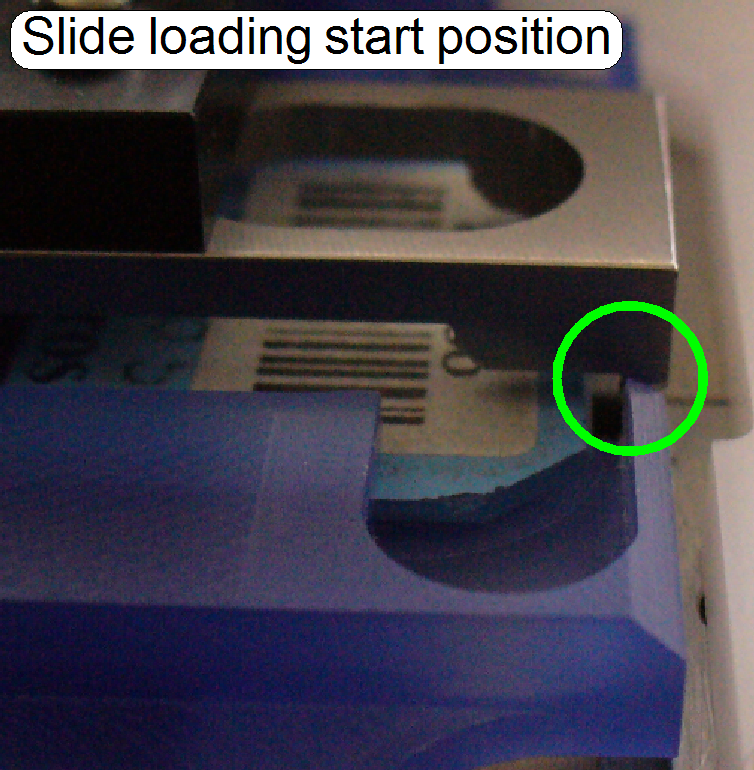 With this start position the slide loader
outer finger should be in plane with the slide bay outer edge of the tray. This
adjustment ensures that the slide can be safely touched on its outer edge
during slide insertion.
With this start position the slide loader
outer finger should be in plane with the slide bay outer edge of the tray. This
adjustment ensures that the slide can be safely touched on its outer edge
during slide insertion.
a.
Insert
a tray.
b.
Set
the slide loader motor to Home1,2.
c.
By
modifying the slide loader position, adjust the position of the claws (by moving
the slide loader with the motor) of the slide loader outer finger so, that the
inner edge of the claws are in plane with the inner edge of the slide bay.
d.
Subtract
from the found value 100 steps and update the value of the parameter “MidiSlideFeederArmSlideLoadingStartPosition”
and save the file.
e.
Check
this adjustment during the slide insert procedure also.
13. Define the value of
the parameter “MidiSlideFeederArmSlideLoadingEndPosition”
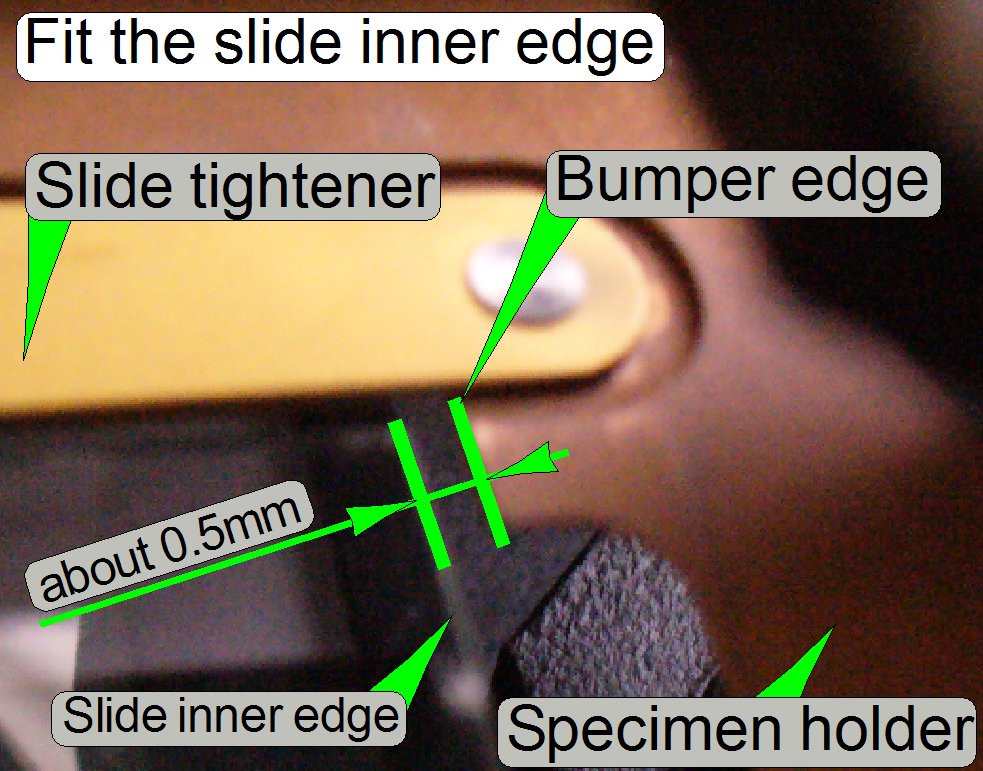 This value defines the gap between the
inner slide edge and the bumper of the specimen holder. For this adjustment the
longest possible slide of
This value defines the gap between the
inner slide edge and the bumper of the specimen holder. For this adjustment the
longest possible slide of
a. Insert a tray with the longest possible
slide.
b. Set the slide loader to the slide loading start position by using the
value of the parameter “MidiSlideFeederArmSlideLoadingStartPosition”.
c. Set the X-Y-stage to the slide insert X and Y-positions; use the values InsertSlidePositionX” and “InsertSlidePositionY1” as defined previously.
d.
Insert the slide with the
slide loader by using the value of 85 000 steps.
e. Increase or decrease the slide loader
position by 100 steps until the gap of nominal
f. Update the value of the parameter “MidiSlideFeederArmSlideLoadingEndPosition”
with the found value and
save the file.
“MidiSlideFeederArmSlideUnloadingEndPosition” This value is usually set to 0. There are
only special cases when this is a negative number.
14. Define the value of the parameter “MidiXPositionToFixTheSlide”
 Find the X-position of the specimen holder with the widest slide
inserted, where the slide tightener is fully released by the release plate and the
slide is tightened.
Find the X-position of the specimen holder with the widest slide
inserted, where the slide tightener is fully released by the release plate and the
slide is tightened.
a.
Insert
the slide of maximal allowed width into the tray.
b.
Insert
the tray with the slide in slide loading position.
c.
Set
the tray motor -1920 steps forward to lift up the slide loader.
d.
Set
the X-Y-stage to X-Home1,2 and Y-Home1,2.
e.
Set
the X-Y-stage to the insert position X by using the value of the parameter ”InsertSlidePositionX”.
f.
Set
the tray motor +1920 steps backward to lowering down the slide loader.
g.
Insert the slide with the
slide loader by using the value of the parameter “MidiSlideFeederArmSlideLoadingEndPosition”.
h.
Set the slide loader to the
slide loading start position with the value of the parameter “MidiSlideFeederArmSlideLoadingStartPosition”.
i.
Set the tray loader motor to
actual position -1920 steps.
j.
Set the X- and Y-motor to
Home1,2.
k. Increase the X-position of the specimen holder until the slide tightener
is even released by the release plate; an accuracy of 100 steps is enough.
l.
Increase
the found value by 100 steps and update the value of the parameter “MidiXPositionToFixTheSlide” with the
found value and save the file.
15. Define the value of the parameter “MidiSlideFeederArmSlideUnLoadingStartPosition”
“MidiSlideFeederArmSlideUnLoadingStartPosition” = “MidiSlideFeederArmSlideLoadingEndPosition”
– 500 steps.
16.
Define the value of the parameter “RemoveSlidePositionX1” and
“RemoveSlidePositionY”
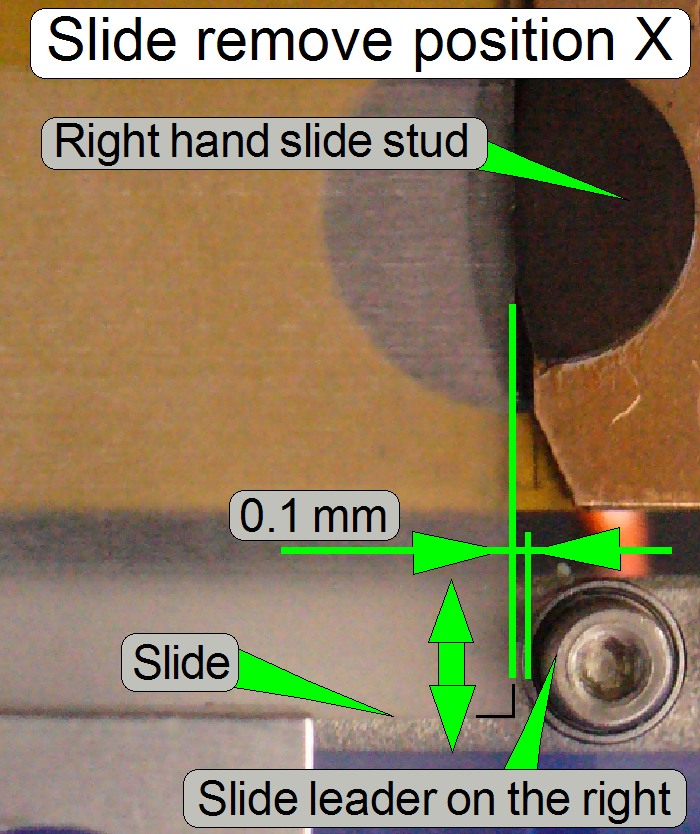 “RemoveSlidePositionX1” = ”InsertSlidePositionX” + 200 steps
“RemoveSlidePositionX1” = ”InsertSlidePositionX” + 200 steps
The slide should
be away from the slide leader by
The value of the
parameter “RemoveSlidePositionY”
is always =0.
The test should run
three times (3 times the full tray). Load a tray with slides of different kind,
including the shortest, longest, smallest widest and thinnest possible slide
and slides without cut corners and start the slide loading test. The position
of the slide in relation to the slide bay should be at the left, at the right
and in the middle position also.
Watch for correct
loading of all the slides, without sound of mechanical jamming and the slides
must not collide with any parts of the slide or tray loader unit or the
specimen holder.
· Please, do not forget to use protective eye wear
while looking!
a.
Check
the position of the support plate in relation to the slide inner edge.
b.
Check
the position of the slide studs in relation to the slide inner right corner
during insertion.
c.
Check
the slide inner edge in relation to the bumper edge of the specimen holder
after the slide is fully inserted.
d.
Check
the following adjustments during the slide load and remove procedure and the
tray movements: 7, 8n, 8o, 12.
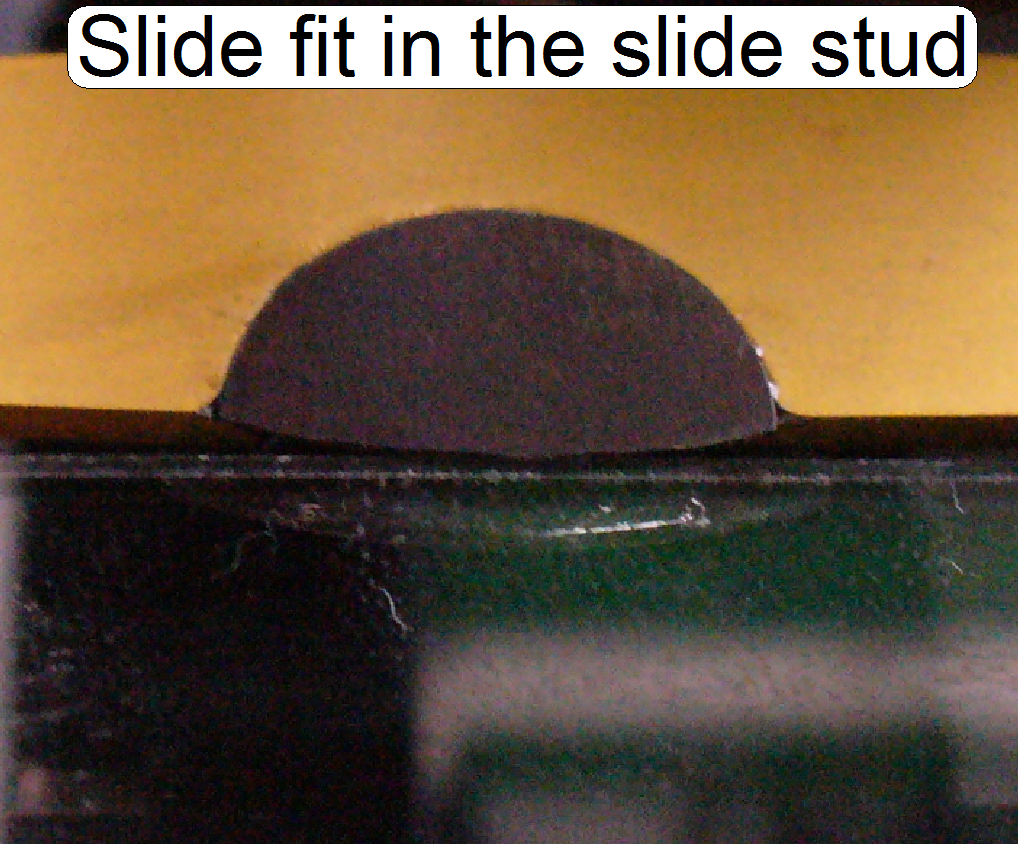
e.
Check the
slide position in the slide studs
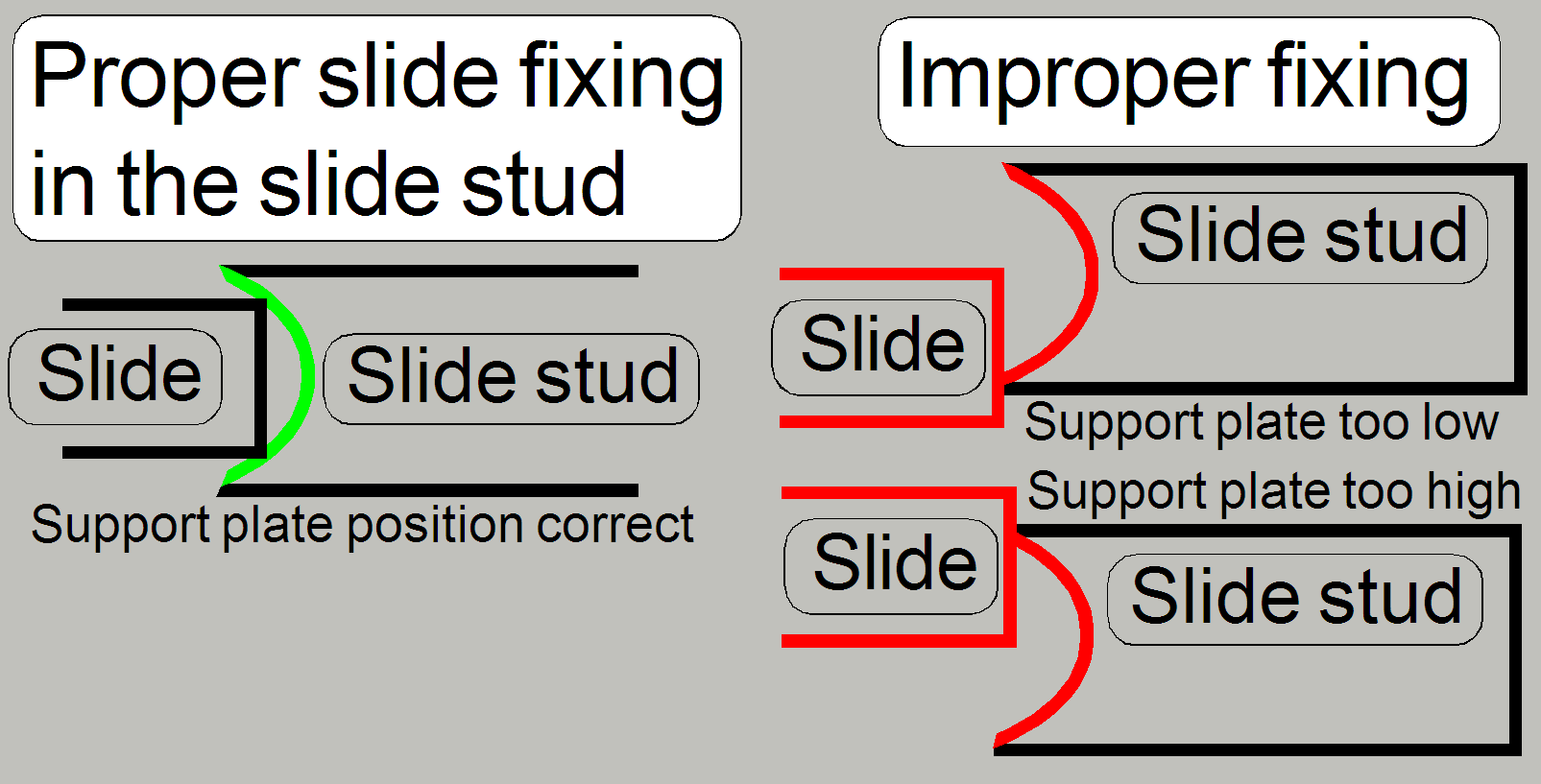 The slide studs should hold the slide
always in the proper position. If the slide is not fixed properly, the height
of the support plate has to be adjusted again (adjustment 9); or the release
plate opens the slide studs too much and the smallest allowed slide may be
inserted slant (adjustment 11).
The slide studs should hold the slide
always in the proper position. If the slide is not fixed properly, the height
of the support plate has to be adjusted again (adjustment 9); or the release
plate opens the slide studs too much and the smallest allowed slide may be
inserted slant (adjustment 11).
·
Check
these adjustments with the smallest and widest allowed slide size.
Fix the
actuating rod strainer position
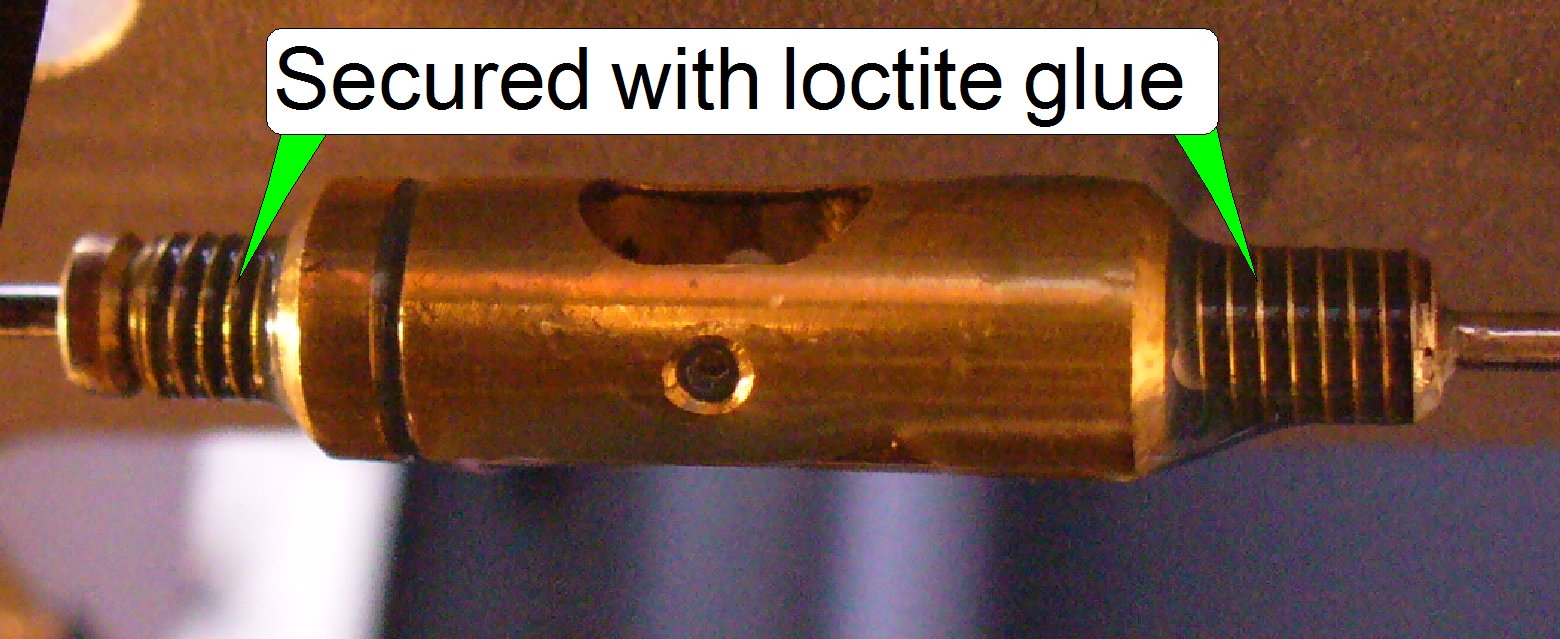 After the short slide loading test passed
correctly, the thread of the rod strainer should be secured in the adjusted
position with LOCTIDE 242 glue. For this it is the best to use a toothpick or a
needle (that can be cleaned after use); drop glue onto the thread on the left
and on the right side of the nut.
After the short slide loading test passed
correctly, the thread of the rod strainer should be secured in the adjusted
position with LOCTIDE 242 glue. For this it is the best to use a toothpick or a
needle (that can be cleaned after use); drop glue onto the thread on the left
and on the right side of the nut.
Important
Please wait about 30 minutes until the glue dry up; otherwise, if the
tests are directly continued, the position of the rod strainer might be altered
and a wrong position will be fixed!!
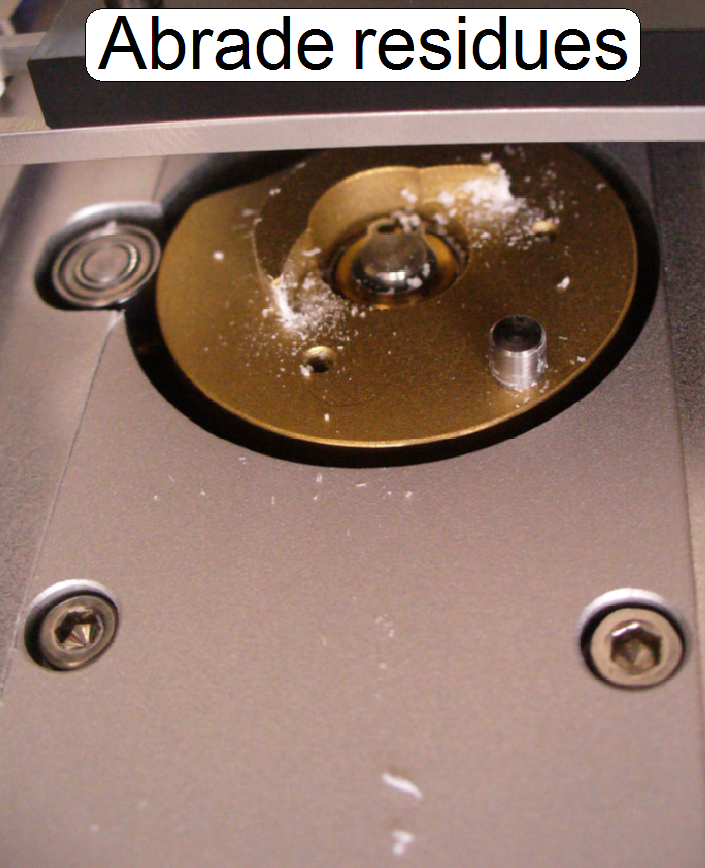 If the tray is brand new and is loaded
first time, abrade residues may occur after finishing the short test. Mechanical
tolerances are so reduced and the stabilizer fits the opposite part on the tray
correctly. Remove abrade with a brush from the tray and the tray loader!
Protect optical surfaces first, even if a canned air blower should be used.
If the tray is brand new and is loaded
first time, abrade residues may occur after finishing the short test. Mechanical
tolerances are so reduced and the stabilizer fits the opposite part on the tray
correctly. Remove abrade with a brush from the tray and the tray loader!
Protect optical surfaces first, even if a canned air blower should be used.
Abrade should decrease
as much as the tray loader procedure runs. The mechanical tolerances of the
tray in relation to the tray loader mechanics are so reduced.
Important
Take care on the objective! Protect the objective and other optical
surfaces in the surrounding before you blowing away abrade; otherwise, may be
you have to clean the optics (preview and illumination mirror, condenser).
Watch video: “Tray and slide loading”; “Remove tray”
After the short
test passed correctly, the loading procedure should be tested for a longer
period with both trays fully loaded with slides of different kind, including
the shortest, longest, smallest widest and thinnest possible slide. The slide
position in the slide bay should be at the left, at the right and the middle
position also. Each tray is usually tested for a time period of at least 1.5
hour. If there is a slide jam or any problem experienced, check and adjust the
appropriate values, doe necessary adjustments and run the tests again.
Dismount and mount the tray- and slide loader unit
Remove the tray- and slide
loader unit
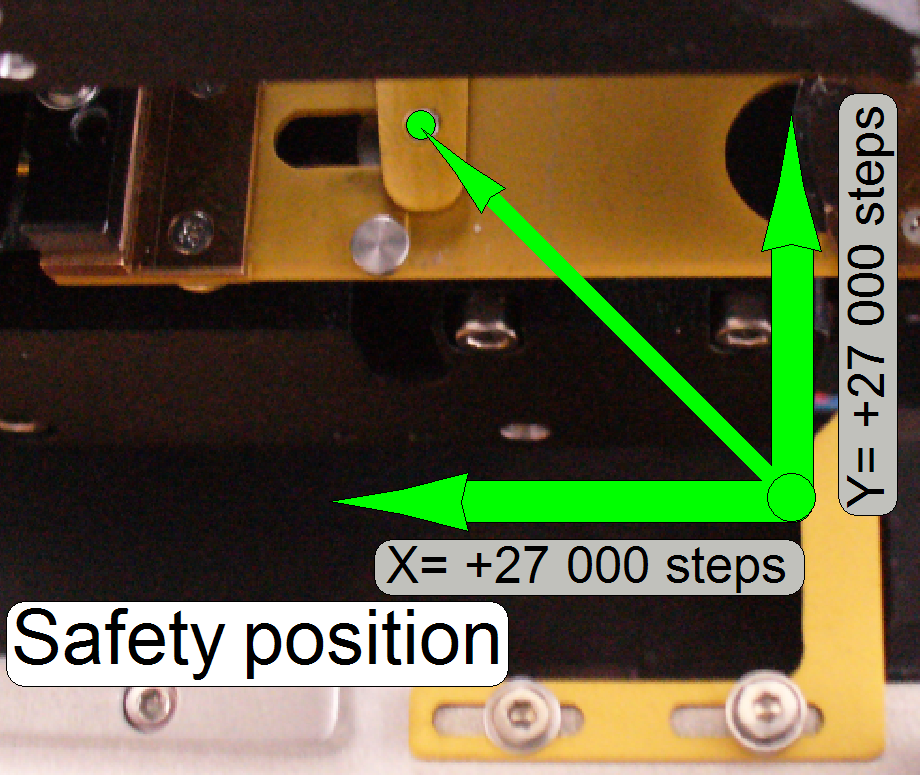 With the SlideScannerService.exe
program and the Low Level Service option move the X-Y-stage to the
position X=27000 steps and Y=27000 steps. This way the tray loader unit
and X-Y-stage are mechanical disconnected from each other and during
dismounting the X-Y-stage slide holding mechanics will not be bend or
damaged.
With the SlideScannerService.exe
program and the Low Level Service option move the X-Y-stage to the
position X=27000 steps and Y=27000 steps. This way the tray loader unit
and X-Y-stage are mechanical disconnected from each other and during
dismounting the X-Y-stage slide holding mechanics will not be bend or
damaged.
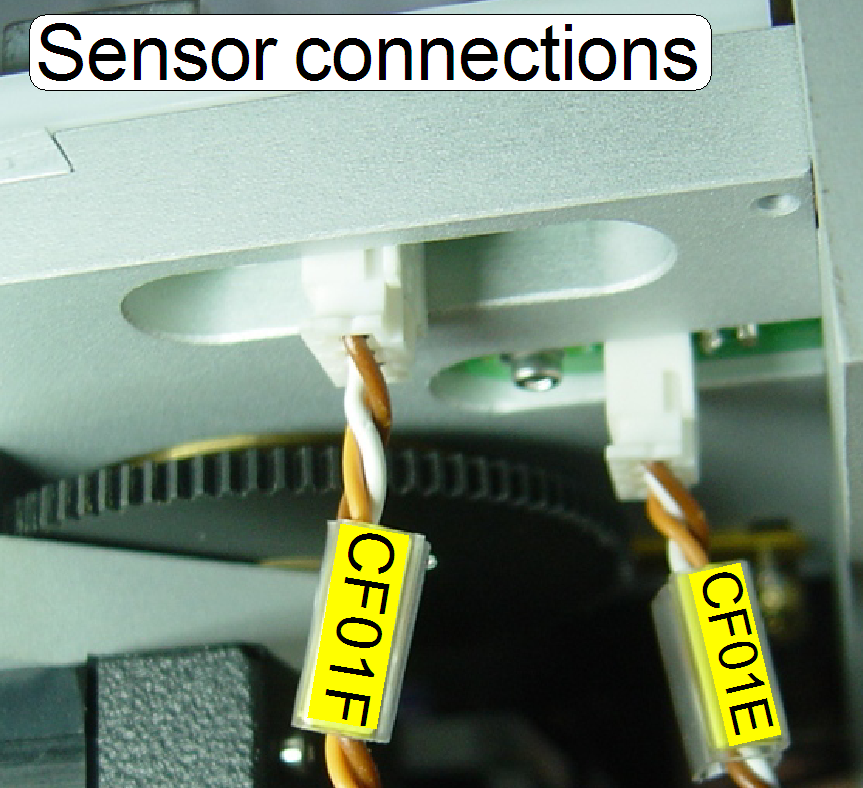
- Remove
the connector for the tray sensor CF01E and the slide sensor CF01F.
- Remove
the connector of the tray loader motor CF11
and the slide loader motor CF04
(not shown).
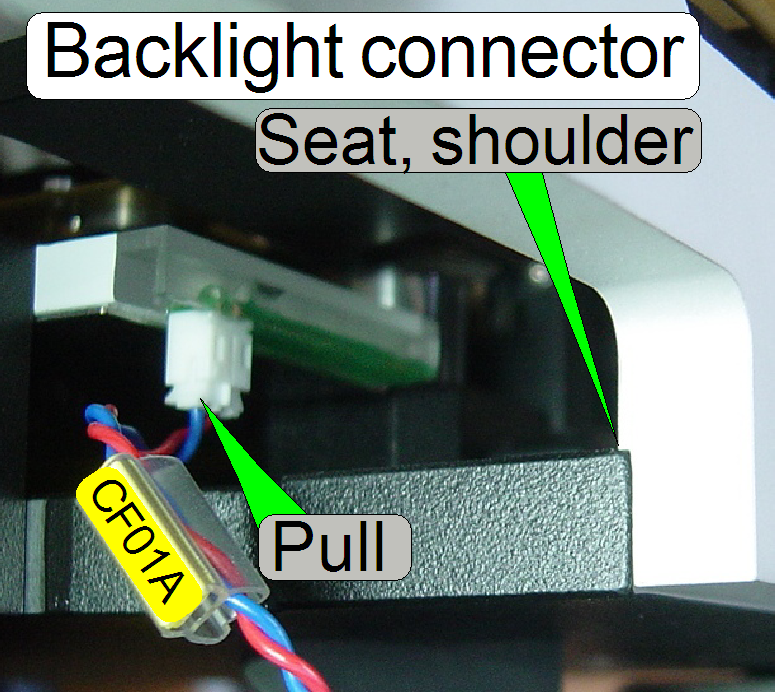
- Remove
the preview illumination connector CF01A.
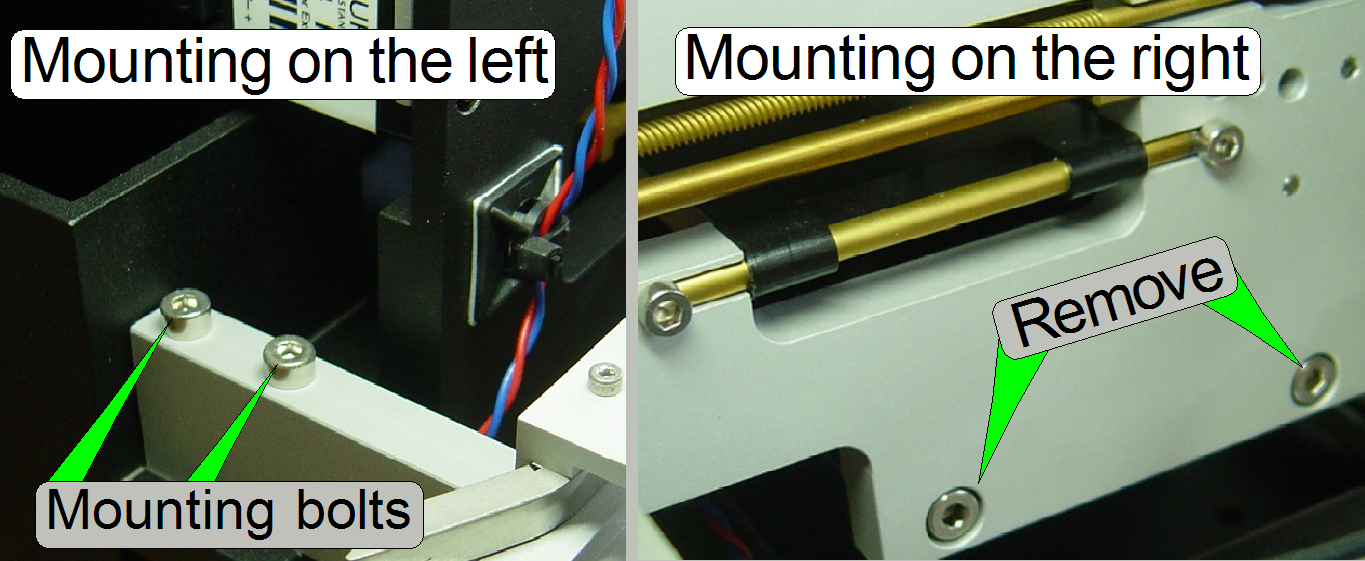 Loosen the bolt pairs on
both sides of the tray loader unit, hold the tray loader unit with one
hand, meanwhile remove the screws and then remove the entire unit frontward.
Loosen the bolt pairs on
both sides of the tray loader unit, hold the tray loader unit with one
hand, meanwhile remove the screws and then remove the entire unit frontward.
Attention!
The
tray loader unit can fall down. Hold on to it while the screws are taken out!
Mount the tray- and slide
loader unit
Important:
Before you mount the tray loader unit; all
optical adjustments should be done correctly as these adjustments will be
difficult or impossible to make after mounting the tray loader unit.
1.
Make sure that the X-Y-Stage is moved
to the position X=27000 steps and Y=27000 steps. This way the tray loader unit
and X-Y-stage would be mechanical disconnected from each other and during
mounting, the X-Y-stage slide holding mechanics will not be damaged or bend.
2.
 Bring
the tray loader unit in position and screw in the right hand mounting bolts
first.
Bring
the tray loader unit in position and screw in the right hand mounting bolts
first.
3.
Drive in the left hand mounting bolts
next.
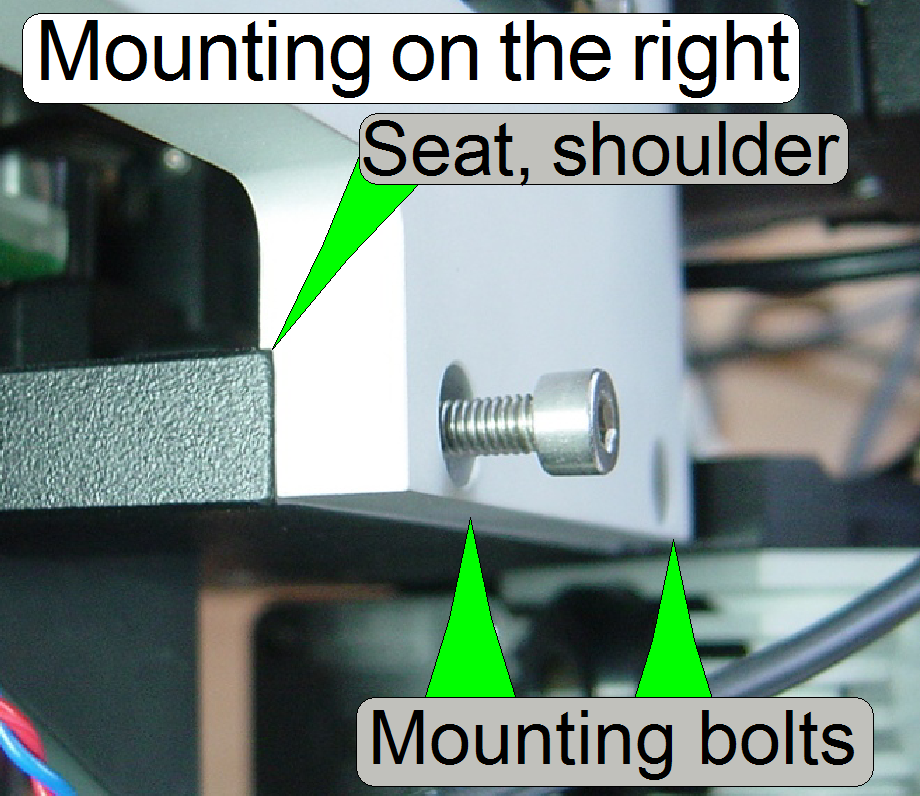
4.
Tighten all four mounting bolts; on the
right side, fit the shoulder with the seat.
5.
Reconnect the cables of the tray loader
motor CF11 and the slide
loader motor CF04 (not shown)
and the connector for the tray sensor CF01E and the slide sensor CF01F.
6.
Connect the preview illumination
(backlight) BGG-2.
7.
Do the adjustments, checks and tests
described above as necessary.
If the same tray and slide loader
unit is mounted again, no adjustments are needed.
If the tray- and slide loader
unit was exchanged, all adjustments should be checked and test sequences should
be executed.